2 基础导航
阅读
2026-04-23更新
最新编辑:glamcurrent
阅读:
更新日期:2026-04-23
最新编辑:glamcurrent

状态:空中
位置:群山北部约5海里
态势:飞行高度为5000英尺 - 航向360°- 速度 350 KTS。进入座舱后脚本将会自动暂停游戏并自动设置航电。请自行按照需求设置MFD。
目标:跟随惯导飞行计划飞行,并尝试塔康导航到群山机场的初始进近点以准备降落
完成本任务的要点在于优秀的事前计划,请记住这句话:完善的计划可以避免差劲的表现
在开始此任务前,让我们了解一下飞行计划。

这次飞行将把我们带到群山以南的光州空军基地。
训练将从Gunsan AB和航路点2之间的某处开始。航路点4的名字是WOLF,是Gunsan AB的初始进近点(IAF)。航路点5为备降机场,航路点7为本次训练结束的地方,你可以在航路点8处降落。此路线在你进入本训练科目时就已在UI的地图界面里标出。所有的路线都为白色,所有的航路点也都是白色空心圆。
空中紧急状态
在执行任务之前(见任务部分),我们需要考虑BMS中的某些故障和对应的应急程序,以避免出现不安全状况。有关详细信息,请参阅 F-16 检查单中的“EP In-Flight”部分。
座舱盖注意(Canopy Warning)灯点亮
如果座舱盖注意灯亮起,说明你的座舱盖没有锁定。轻轻地将座舱盖蜘蛛杆向外推,注意可能容易被忽视的可点击点。座舱盖灯熄灭后,你就可以继续飞行了。
但是,如果座舱盖灯没有熄灭,请参阅下一节 “飞行中座舱盖丢失/穿孔 ”以获取进一步说明。
飞行中座舱盖丢失/穿孔
虽然这种情况在 BMS 中不太可能发生,但如果座舱盖蜘蛛杆无法锁定,且座舱盖警告灯仍然亮起,请按照以下步骤进行操作:
- 将头盔遮光罩放下来(一般情况下,遮光罩应该放下来,以便在这种不可能发生的情况下保护你的脸)。
- 将速度降到180节以下
- 将座椅降到最低高度
- 将ALT FLAP(备用襟翼)开关拨到EXTEND(展开)位
- 在可行的情况下,尽快计划并实施着陆
座舱加压失效
座舱盖提示灯点亮也代表驾驶舱出现失压,可能是由于舱盖密封问题或环境控制系统(ECS)故障或关闭。如果到达气压高度27,000英尺,此时座舱压力提示灯将点亮。此时请将高度降到25,000英尺以下,将速度维持在500节以下。在低于25,000英尺高度时可安全继续飞行。
在BMS 4.34中,缺氧效果已经实装。如果下降速度不够快,可能会导致飞行员晕厥。如果在下降过程中发生晕厥,除非飞机先撞地,否则飞行员会在到达较低高度时清醒。
设备过热(EQUIP HOT)提示灯
在这种情况下,第一步是确保将AIR SOURCE(气源)旋钮设置为NORM(正常)。将发动机转速降至 80% RPM。设备过热(EQUIP HOT)指示灯点亮的另一个潜在原因是起落架在低空长时间未收起。在8000英尺以下长时间放下起落架飞行超过7至8分钟可能会导致ECS (环境控制系统)关闭。如果 设备过热(EQUIP HOT)指示灯持续点亮,请关闭所有非必要的航空电子设备(FCR 将自动关闭),并尽早着陆。
弹射
鉴于在赛博空间中绝对不存在任何致命或受伤的风险,因此在认为必须使用弹射装置时不应该有任何犹豫。只需拉动手柄,你就可以安全升空,与降落伞会合。
电子系统失效
ELEC SYS(电子系统)提示灯点亮表示电气系统出现故障。有关故障排除,请查阅Dash-1的第6.10章节。需要注意的是,电子系统提示灯不能通过主警告灯(Master Caution)重置。要重置任何电子系统警示灯,请使用 ELEC 面板上的 “Caution Reset ”(提示重置)按钮。
发动机故障
在BMS中实装了飞行时可能会导致发动机故障的几种原因。地面上的AAA(防空火炮)或SAM(地对空导弹)的空爆火力会导致发动机熄火,而在发动机在运作期间冒烟时,特别是在负过载机动时,可能会出现燃料供应不足的情况。在大多数情况下,你可以尝试通过空中启动程序来尝试重启发动机
空中启动流程
空中启动程序根据 Falcon BMS.cfg 中“ Idle Cut-off ”(怠速/关断)选项的设置而有所不同。如果禁用怠速/关断选项(默认),则需要按下(不拟真的)关断卡位键。启用“怠速/关断 ”选项后,依靠节流阀的机械关断位来关断时就不需要按键了。
发动机停机的初期信号包括转速和FTIT读数下降,并伴随发动机噪音的变化。如果应急动力装置(EPU)开关位于“NORM”(正常)位,它会立即启动运行,用以应急供电和为液压总线提供动力。但是,EPU的燃料会根据其转速而消耗殆尽。使用肼的EPU在耗尽燃料前可持续运行约10分钟。
当发动机熄火时,转速仍可能维持着较高的水平,尤其是在俯冲时,你可以尝试不使用喷气发动机燃料启动器(JFS)进行空中启动。只有当发动机转速低于20-25%的限制时,才有必要使用JFS辅助空中启动。
要在发动机转速足够的情况下空中重启,请将节流阀置于关断位(或使用怠速/关断切换键),然后越过怠速位,将节流阀置于中位。监视发动机是否有重新点火的迹象,例如FTIT和RPM读数的增加。
如果仅靠转速不足以进行空中启动,但飞机拥有足够的高度时,你可以考虑通过俯冲让发动机扇叶转动,从而提供足够的压力重新点燃发动机。
如果高度也不够,无法通过俯冲来提升速度的话,可使用JFS协助空中启动。请在低于20,000英尺和空速低于400节时启动JFS。进入JFS包络线后,将节流阀置于“关断”(CUTOFF)位,打开JFS将转速提高到25%。成功重新启动发动机后,手动关闭 JFS。
需要注意的是,JFS的限制与地面类似,JFS储备的能量只够尝试两回发动机启动(START1时为50%的机会,START2时只够1次尝试),JFS只有在发动机运行时才能进行充能。发动机重新点火后,在有足够推力进行平飞的情况下,根据需要设置油门。确认主发电机和备用发电机提示灯均已关闭。使用ELEC CAUTION RESET (电气指示灯重置)按钮清除所有的ELEC SYS指示灯。将EPU开关拨到 “OFF”,然后再次拨到“NORM”。
熄火降落同时也是训练任务7的科目
在没有发动机动力的情况下降落是一项具有挑战性的任务,需要你仔细计划。你必须考虑当前的天气条件、能见度、风力、飞行员训练素质以及模拟熄火演习的成功率等因素。然而,失败并不会带来重大后果,而且, BMS的座椅弹射包络线范围很大。
要执行熄火着陆,应立即朝向最近的机场跑道。扔掉挂载以减少阻力,确定最佳航程空速。你必须要知晓自己的位置和最近机场跑道的位置,确定最佳空速。最佳航程速度会受到总重影响,一般最佳速度为210节,你可以通过维持7°攻角来确定最佳速度。
需要长时间的滑翔时需要考虑使用 EPU 燃料作为液压和应急动力的来源。一旦肼耗尽,EPU 将下线,此时 F-16 将无法受控。EPU 在使用肼的情况下大约有10分钟的续航时间,因此计划熄火着陆时不要超过这一时限。
两种基本的熄火降落方法是直接(直入式)和Overhead式。直接进近比较简单,但没有任何的容错余地。如果有足够的高度,则Overhead模式降落更为安全,如果你已经练习过并熟练掌握,你可以根据视觉提示和参照物来掌握每个降落阶段的状态。
抛离挂载
选择性抛离和紧急抛离都是BMS中的主要抛离方式
选择性抛离
选择性抛离模式用于抛弃选定的挂载和挂架(对空导弹和吊舱除外)。该模式需通过SM 页面的S-J子页面进行预编程,飞行员能够在此页面选择特定的挂载(如油箱),以便在飞行过程中进行挂载抛离。
要进行选择性抛离:
- 进入MFD的SMS页面
- 使用OSB #11按钮进入S-J子页面
- 第一次按下位于挂载点旁边的OSB按钮是选择抛弃挂载,按下第二次是选择抛弃挂架(如果存在)
- 飞行员可以在S-J主模式下预选要抛离的挂载,这些设置将在切换主模式时被继承
- 在主保险(Master Arm)打开(ARM)时按下武器释放按钮(pickle)便会抛离选中的挂载
- 在成功抛离后,高亮的挂点将会在S-J页面上消失,显示的武器存量也会归零。S-J模式优先于任何其他的武器设置
紧急抛离
紧急抛离是一个在紧急情况下一步到位迅速减少总重的方法。它会将除了对空导弹和吊舱外的所有挂载抛离。不同于选择性抛离,紧急抛离不需要你打开主保险
要执行紧急抛离:
- 在按下紧急抛离(Emergency Jettison)按钮的同时,SMS页面将会显示E-J子页面
- 抛离所有的可抛离挂载和挂架
- 紧急抛离不需要打开主保险
警告
虽然在BMS中不经常发生,但在放下起落架的时候抛离挂载可能会导致碰撞,你应该避免此种情况的出现。在抛离挂载前请保证起落架已经收回。
要想在地面抛离挂载,你需要将起落架面板上的"GND JETT ENABLE"(启用地面抛离)开关拨到"ENABLE"(启用)位。不过,此方法只能用于最终解决方案。
空中EGI校准(IFI)
虽然没有完全实现对空中EGI校准的模拟,但是在 BMS 中执行空中校准还是可以的,目前BMS在一定程度上模拟了AUTO IFA(自动空中校准)功能。此过程依靠 GPS 进行内部校准,无需飞行员进行任何输入即可定位。如果将来引入MANUAL IFI(手动空中校准),则可能需要飞行员输入fix点。
步骤:
- 当需要空中校准时,请保持平飞和直线飞行,不要加速
- 将EGI旋钮扭至OFF(关闭)位10秒(保证OFF和AUX旗帜在ADI仪表上出现)
- 移动EGI旋钮到in-flight ALIGN(空中校准)位
- DED上将会显示INS(惯导)页面,你可以通过此页面来监视EGI校准进度,此时HUD上也会显示ALIGN(校准)字符
- 注意现在版本暂时不能通过UFC手动输入磁航向;此步骤暂由系统自动完成
- 类似于地面校准,所有的导航数据将会在空中校准时从HUD和MFD上消失
- 要注意的是校准完成时不会有明显的提示,空中校准程序将会一直持续直到EGI旋钮扭回NORM(正常)
- EGI 状态为 8.1/10 时可以认为已拥有足够的校准精度(一旦 AUX 旗帜从 ADI 中消失,则通过GPS校准的精度已足够精确)。
- 将EGI旋钮调回至"NORM",所有的导航信息将会重新在HUD和MFD上显示
可控性检查
当怀疑或发现有结构性损坏或任何会影响飞机操控的故障时,都必须执行可控性检查。请遵循以下检查步骤:
- 到达安全高度:爬升到安全高度,以便有充裕的时间进行可控性检查
- 减小总重:降低飞机的总重,以增加飞机的机动性和控制性
- 如果发现前缘襟翼损坏,请锁定(LE FLAPS)前缘襟翼:如果观察到前缘襟翼(LEF)损坏,请锁住LE FLAPS以减少潜在的操作问题
- 确定最佳着陆配置:通过调整着陆配置来评估最佳的着陆配置,同时考虑增加阻力(如放下起落架等)以及最佳迎角和着陆速度等要素
- 使用已确定的设置来着陆: 使用已评估确定的设置来执行着陆程序。
如果在可控性检查中证明飞机无法控制以达到合理的着陆速度,则应考虑选择可控弹射。
失控恢复
通常情况下,大多数失速恢复会在放开操控的10-20内自动完成,恢复表现为机头向下,空速增加
为避免再次陷入失速,请飞行员在飞机空速到达200节后再进行飞机操控
漏油
战损可能会导致燃油泄漏,你可以在受到损伤时观察燃油量是否下降,燃油表指针是否快速的朝0方向移动来辨别是否存在漏油。当怀疑燃油泄漏时:
- 目视确认:
- 观察燃油量是否忽然下降
- 注意到燃油量指针异常快速的朝空油方向移动
- 避免使用加力:
- 为防止加剧燃料流失,请勿使用加力燃烧器。
- 最大限度的提高航程和高度:
- 最大效率地利用燃油以延长航程
- 爬升到更高的高度,优化滑翔航程
- SFO(模拟熄火降落)计划:
- 计划执行模拟熄火降落,考虑燃油导致的降落困难
- 尽量减少燃料泄漏:
- 找出漏油源头
- 将 FUEL QTY SEL(燃油量设置)旋钮调到"NORM"(正常)位,此时会超控自动前向输油功能
- 处理失衡:
- 根据泄漏源调整ENG FEED旋钮,以平衡燃料失衡
- 重大紧急事件:
- 确认漏油是否为飞行中的重大紧急事件
- 尽早准备降落
针对燃油泄漏采取及时有效的应对措施,对于确保飞机安全和成功着陆至关重要。
液压泄漏
机体表面损伤可能会导致液压泄漏,而机油对发动机的运行至关重要。你可以通过油压表来观察是否存在液压油泄漏的问题。 保持足够的油压对于发动机运行非常重要,PW和GE发动机对于油压有不同的阈值:
- PW发动机:怠速时至少有30 psi油压
- GE发动机:怠速时至少有25 psi油压
如果油压低于这些阈值,那么油压泄漏问题将构成空中紧急状态,请在必要时尽快降落。
重要的点:
- 警告灯延长点亮:
- HYD OIL PRESS(液压油压力)警告灯不一定会立即点亮,因为油压泄漏问题恶化的较慢
- 节流阀管理:
- 若怀疑出现油压泄漏问题,请慢慢移动节流阀(请保持节流阀为于80%的位置,除非有必要大幅调整)
- 尽量不要大幅机动来让发动机承受过大的压力
- 计划模拟熄火进近:
- 尽早计划采用模拟熄火(SFO)法降落
- 激活EPU并时刻监视状态:
- 激活应急动力单元(EPU),监视EPU燃料消耗状态
- 如果EPU一开始是关闭的,则请做好准备,在发动机故障时立即打开EPU
解决发动机机油泄漏问题需要采取谨慎而积极的方法,需要立即采取行动并为潜在的紧急情况做好准备。
机体表面受损检查
BMS 增加了因战损和其他损坏导致系统故障的可能性。发动机熄火、燃油泄漏和机油泄漏现在会构成生存威胁,因此执行损伤检查也非常重要。我们强烈建议你寻求一名人类僚机进行协助(如果有的话),进行目视评估并确定损坏程度。
从僚机的角度可以看到燃油泄漏和机油泄漏。这两种情况都会产生白烟,但需要注意的是,机油泄漏具体来自发动机,而燃油泄漏可能来自机翼、机身等不同部位的油箱。
结冰
随着4.35版本的发布,现在结冰是一个需要重视的问题。我们强烈建议你在飞行时避开结冰区域。在中等高度区间的潮湿空气中,特别是是多云条件下,发生结冰的概率会更大。在BMS中,这等于是在恶劣天气条件下飞行。F-16配备了两种防冰保护系统。
第一个系统用于防止发动机进气口积冰,防止发动机扇叶受到脱落的冰块撞击。第二个系统用于探头加热,防止冰块污染数据探头而导致的仪器读数异常。
虽然机载系统可以处理轻度至中度结冰,但不建议故意在已知结冰条件下飞行,因为严重结冰可能会影响机载系统的运行性能。没有使用防冰开关( ANTI-ICE )来保护进气口或防冰系统故障都可能会导致发动机损坏。
类似的,没有正确使用探头加热开关(PROBE HEAT)或者探头加热系统损坏也会影响机载仪器读数,这种情况在仪表气象条件(IMC)下飞行是非常危险的。
飞控(FLCS)故障
根据 FLCS 故障的严重程度,飞行员会通过三种不同的方式收到警告:
- FLCS WARNING Light(飞控警告灯):此灯只有在故障消失后才熄灭。此灯代表严重(serious)故障
- FLCS CAUTION Light(飞控指示灯):此灯可以通过按下F-ack按钮或者是故障消失后熄灭。此灯代表出现重大(significant)故障。
- PFL Messages(飞行员故障列表信息):次要故障只会在PFL中通报
要处理飞控紧急情况请遵循以下步骤:
- 阅读PFL显示的信息
- 按下F-ack按钮重置指示灯
- 查询飞行员故障列表(位于TE第三章或查找BMS紧急情况检查单)
- 查找对应的FLCS紧急状况处理程序
- 执行处理程序后按下FLCS RESET(飞控重置)按钮
- 回显故障提示灯检查故障是否仍然存在
BMS 考虑因素: 并非所有 FLCS 故障都会在 BMS 中发生。FLCS 是一个四冗余系统,数字备份 (DBU) 系统完全没有实现。
空中数据故障
在BMS中,探头向FLCS提供错误的信息的概率非常低。单个冗余故障会触发FLCS 提示(FLCS CAUTION)灯和FLCS ADC FAIL PFL信息 。两个冗余故障则会触发FLCS 警告(FLCS WARNING)灯,FLCS也将切换到STBY(待机)增益,由 PFL 警告级别信息提示。重置 FLCS 可清除双冗余故障并退出 STBY 增益,但一级故障(单冗余)仍处于锁定状态。
攻角故障
单冗余故障(提示(Caution)级别)由 FLCS 提示灯和 FLCS AOA FAIL(飞控攻角失效) PFL信息提示。双冗余故障为警告(Warning)级别,会触发FLCS WARNING(飞控警告)灯点亮和FLCS AOA WARN(飞控攻角警告)PFL信息。在双冗余失效期间,FLCS会选择11°攻角,虽然会影响到巡航配置,但是足以满足着陆所需。根据情况,FLCS RESET(飞控重置)可以清除双冗余故障并恢复到单冗余故障状态。如果双冗余故障持续存在,则应尽快着陆,进场时请不要超过 11°攻角。
CADC & Servo故障
暂未在BMS中实现
飞控电子故障


飞行中报告了两个单独的电子故障:BRK PWR DEGR(刹车性能降低)和FLCS CCM FAIL(飞控线圈电流监控失效)PFL信息。在BMS中,只有第一个与刹车管理相关。线圈电流监控(CCM)信息可能会显示,但在BMS中没有任何影响。如果显示BRK PWR DEGR PFL信息,则必须测试FLCS电源以确保刹车能正常工作。
自 BMS 4.35 以来,四个 FLCC 冗余中的任何一个都可能单独发生故障,如果两个冗余都发生故障,则可能出现 DUAL FLCS (双冗余)电子故障。这将触发 FLCS 警告灯和更多 PFL 信息。双重电子故障可以通过FLCS RESET复位,但只能复位到单一故障级别。如果无法复位双重故障,请尽快着陆,并注意此时FLCS将会降级到"STBY"(待机)增益的飞行特性。将刹车通道设置为通道2,如果情况允许,请使用地面拦阻装置,并在进近和气动刹车时避免迎角超过11°。
更多信息,请参阅 Dash-34 第 7 章。
任务
当整个飞行计划(或者是单段路线)变红,那说明飞行计划有问题。大多数可能的问题有:没有足够油到达此位置,计划到达时间不合理,航路点有问题。当你自定义训练任务时,在起飞前一定要先保证所有的航路点和路线段都没有变红。
地图上任意两个航路点间的距离都是由海里为单位标注。你也可以使用地图尺(Ruler)来测量距离,你只需要在地图空白处点击右键然后选择Ruler就可以调出标尺。呼出的尺子将以默认20海里长出现在地图上,你可以将尺子两端的三角形放在你需要测量的两个点上便可知道这两个点间的距离。在规划任务时,地图尺功能非常有用。请注意:在本次飞行计划中地图尺功能被用于测量规划了航路点6到Muan国际机场(塔康频道:65X) 的距离。地图尺同样也能显示轴的角度。在本例中若是从航路点6飞到Muan则角度为299°,若是从Muan飞向航路点6 则角度为119°.
备降机场在飞行计划中是一个航路点。在本例中我们的飞行计划从Gunsan(航路点 1)开始,在Gunsan(航路点8)结束,而我们的备降机场是航路点9(Gwangju空军基地)。顺便一提,航路点5同样也是Gwangju空军基地。
在地图页面中没有关于塔康频道和机场相关的信息,因为容易导致地图信息过多。但是这些信息在飞行中至关重要,且在计划时必须考虑到这些要素。你可以使用多种工具来进行处理,一般来说,你可以使用WDP和数据盒自动处理这些数据以供飞行中使用。
以下为本次训练中将会用到的信息:
- Gunsan: 塔康 075X - 跑道 18/36 - 36跑道ILS: 110.3 - 海拔: 10ft - ATIS: 120.225 - 地面频率:273.525 - 塔台频率: 292.3 - 离场/进场: 292.65
- Gwangju (Alternate): 塔康 091X – 跑道 04/22 (左/右) – 14左和22右跑道ILS: 111.1 – 海拔: 110 ft - ATIS: 128.875 - 地面频率: 275.8 – 塔台频率: 254.6 – 离场/进场: 268.0
- Mutan: 塔康 065x
- MOA (Military Operation Area):军事活动区域 (见地图上每个区块的标记)(在其他飞机在这些区域训练时禁止进入)
- MOA 15有效:11000’到 FL400
- MOA 17有效:5000’到 FL400
- MOA 19有效:10000’到 FL400
任务计划中同样显示了这些相关区域或特定点。这些信息由线段和预计划威胁点组成(PPT)。你可以在地图空白处右键选择 Set STPT Lines 来创建线段,右键选择 Set Pre-planned Threat Stpt 来创建预计划威胁点。
线段通常用于标记一个特定区域如 FLOT Lines (己方前线部队)、CAP box(空中战斗巡逻区域)、AAR boxs(空中加油区域)、AOR(area of responsibility)(责任区)、Kill Boxs(杀伤盒)等
PPT(预计划威胁点)常用于标记IAF(初始进近点)、进入点(entry point)、集合点(rendezvous points)、推进点(push point)等。你也可以使用PPT来标记每块由线段围起来的区域,如本任务中的MOA区域。线段和PPT可完全自由定制,你可以根据自己的喜好使用 WDP 或直接编辑 PPT.ini 文件进行标记。
编号为15、17和19的MOA区域已经被用线段围起来并进行了标记,Gunsan的WOLF初始进近点已经使用了PPT点进行标记,ILS跑道36也进行了标记。所有这些线段和标记点都会在你载入了DTC以后显示在你的HSD上。

地图还显示了由两个数字组成的每个区块都有的MEF(最大海拔)。MEF是每个框中已知的最高海拔点。 它们以百英尺为单位,大数是千英尺,小数是百英尺。例如:5²代表 5200英尺。为了保证自己不撞地(如低可见度状态下)你需要至少高于此参考值 500英尺以上。 MFA + 500ft = MSA(最小安全高度),除非说你正位于公开的标准近出场航图的路线中。
你也可以使用以下方法确认你计划路线上的高度:第一个和最后两个航路点(出发机场,到达机场和备降机场)都为地面标高。其他转向点的高度以两个不同的图形显示,你可以使用 UI 右侧的两个图形按钮启用或禁用它们。飞行计划总距离为218海里,ETE(预计飞行时间)为25分钟。
你可以点击地图上的航路点来获取更多信息,此时一个新的对话框将会出现:

- 小队呼号:Goblin 2-1
- 航路点编号
- 到达航路点时间(TOS)
- 飞跃航路点所需高度
- 计划空速
- 计划队形
- 路途中/到达航路点时的行动。若是后者行动类型被定义,则下部的选项框将自动变成相关信息。
- 在变更高度时爬升/下降的动作,可以被设置为立刻(immediate)和推迟(delayed)
在你进入驾驶舱后所有上面的信息将会载入到机载电脑中。对于飞行仪器来说,惯性导航中最重要的设备是HUD和HSD页面。
水平态势显示(HSD)页面可以当作本机的上帝视角。它可以在5-240 海里之间缩放,它会显示你的飞行计划,PPT点和线段,如下图所示。
更多信息请参考Dash-1


以上的截图为任务开始时所截。你在Gunsan空军基地和航路点2的中间,高度位于4800ft QNH,校准空速为300KTS。
若未选中航路点2,你可以点击位于UFC上的上▲箭头按钮来选择航路点2,此时DED显示屏的最右上角会变为2。当你将航路点2设为当前航路点时,HSD页面上的航路点2将会变为白色实心圆。若航路点在HUD的视场范围内的话代表航路点的菱形符号也会出现在HUD上。若航路点超出HUD范围,菱形将会带有X符号并位于距离航路点位置最近的HUD边缘处。
HUD上的大圆圈航路点提示符(aka tadpole)也可以进行辅助导航,上图中为FPM提示符左侧符号。距离和ETE(预计飞行时间)都显示在HUD右下角。上图中距离航路点2约 11.1海里,以现在的速度到达航路点2需要约 1分59秒 才能到达航路点
缩小HUD显示范围到80海里以显示所有计划航路点。按下HSD页面的CEN(OSB1)来将本机置于HSD的中心。HSD页面将会显示雷达搜索锥、线段、PPT(预计划威胁点)和飞行计划。你可以点击MFD的OSB 19和OSB 20按钮来放大/缩小HSD页面,或者是将HSD的光标向顶部/底部边缘移动来进行手不离杆放大/缩小。

训练任务初始场景,背景为Gunsan空军基地


将tadpole放在FPM中来保证向航路点2飞行,如右图所示: 请尝试将FPM符号维持在水平线上来保持5000ft的高度(0°俯仰线)
在你接近选中的航路点时,计算机将会自动切换到下一个航路点(此功能默认关闭)。使用UFC来打开STPT页面(按下UFC的4(STPT)键),并按下UFC的向右来将手动切换航路点改为自动切换航路点。再按下UFC左键退回到CNI页面,你可以注意到航路点编号跟着A字符,这说明自动切换航路点功能生效。此时若到达航路点2时,航电将会自动切换到下个航路点。

在CNI页面下,按下UFC向右键可以显示风向和风速,你可以知晓你会因为风偏离多少。在本例中,风来自327°风速18KTS。我们现在的航向是360°,此时我们可知风正在将飞机向右推。你也可以从HUD上FPM符号的偏移来感知风偏的影响。若是你凑近了看HUD可以发现FPM符号并不在中心,而是在偏右侧的地方,表明风正在带着飞机向右偏移。若是侧风量增加则偏移量会越来越大。
在任务的某些阶段,HUD中的FPM漂移可能会造成困扰,因此可以通过将CP DRIFT开关置于DRIFT C/O位置来停用偏移功能。 此时FPM将保持在HUD的中心位置。
在降落前请确保你将此开关复位回NORM。
在到达航路点2后,HUD将会切换航路点符号到航路点3。右转,保持飞行高度直到你能在HUD上看到棱形的航路点提示符。将航路点对齐到FPM符号,使得tadpole的向量垂直。
在航路点2和3之间,我们将进行G热身(G-WarmUp)。 4.36引入了热身和疲劳的概念。 为了获得飞行员的最佳G响应,在每次战斗或训练任务之前应进行G热身程序。G热身包括在 3-5G范围内机动来预热体能,在这个G值范围训练得越多,你的身体适应大G值的时间就越长。 例如,在3-5G范围进行45秒的预热将提供20分钟的全G值对抗能力,20分钟后,你应再次进行新的预热。如果没有适当的热身,飞行员对过载的抵抗能力将会受到限制。 飞行过载超过7G的次数越多,热身的疲劳效果就会越快出现。在执行超过一定次数的高于7G的机动后,飞行员对过载的抵抗能力将变回无热身时的抵抗能力。
在到达航路点3之前执行两次G热身训练,以5000英尺和400-425节的速度执行一次左转90°和右转90°。第一个90°转弯时请保持3-5G过载。 第二轮保持5-7G过载。你可以将油门设置到军推/全加力位来保持过载。
飞行计划要求爬升至FL200(相当于标准大气压下的20000英尺(QNE,29.92英寸汞柱或1013百帕))。你可以通过轻轻拉杆来实现爬升,此时飞机将开始上升,而空速会开始下降。
在这个训练场景中,我们将学习如何以高效的燃油状态进行爬升。燃油消耗是整个任务中都要关注的问题,所以应尽一切可能来节省燃油。一种高效的爬升方式是:以一定的速度爬升,并调整爬升角度以维持该速度。将油门推到巡航(军推功率),等待达到350节的速度,然后拉杆并调整爬升角度以在整个爬升过程中保持350节的速度。当你爬升时,你的空速可能会降到350节以下,如果是这种情况,只需减小爬升角度以稳定你的空速至350节。
在爬升至14000英尺时,将高度表调至QNE:1013百帕或29.92英寸汞柱。这是在KTO(朝鲜战区)过渡高度以上飞行时的标准大气压。从现在开始,高度将不再用英尺表示,而是用百英尺表示的飞行高度(Flight Levels,FL)。例如:FL150表示15000英尺。在达到FL200之前,减小爬升,以达到分配的高度水平。根据你的总重量,你可能还需要稍微减小油门以保持350节的速度。
现在是时候检查油量了,燃油剩余和燃油平衡问题是首要关注的点。你可以通过查看右侧AUX面板上的燃料表来检查剩余燃料。燃料平衡状况可以通过查看燃油表上是否有红色部分来确认。如果你看不到红色部分,那么你的燃料负载是平衡的。如果你看到红色部分,那么你应该立即解决,检查ENG FEED开关的位置。
在到达航路点3时,航电将自动切换到航路点4,你的HUD将显示与STPT 4相关的信息。航路点信息也会显示在位于中央控制台上的水平状态指示器(HSI)上。该仪器 在BMS-Comms-Nav-Book.pdf 的第3.1.3章中有详细解释。
根据INSTR MODE旋钮的位置,HSI将指示与选中塔康站(TCN和TCN/ILS位置)或选中的航路点(NAV和NAV/ILS位置)相关的导航信息。
将旋钮移动到TCN位置,注意方位指示器将指向KUN TACAN,如下图左侧的截图所示,它会移动到3点钟方向。仪器左上角的DME窗口显示19(.5) Nm,一旦与CRS旋钮中心对齐,CDI将指示到Gunsan的方位为248°。
如下所示的HSI略有不同,比正常的HSI更精确,因为它是使用MFDE(MFD Extractor)软件提取的EHSI,这是一个第三方软件,用于提取仪表以供多屏幕和驾驶舱使用。
如果将INSTR模式调整到NAV,HSI将更改并显示与活动航路点4相关的信息。方位指示器将会旋转到12点钟位置,表示航路点位于正前方。DME窗口将显示9.3Nm,这与HUD中显示的距离相同。请注意,Course Arrow仍然为248°,与以前一样。CDI可以用来拦截与导航台或航路点相关的辐条,这在BMS的在BMS-Comms-Nav-Book.pdf手册中有解释。


在我们飞跃初始近进点WOLF(航路点4),我们会检查INS坐标与Gunsan进近图上的IAF是否相符。WOLF距离Gunsan TACAN是R090° DME 20。坐标是N35°57.990’ E127°50.029’。

在切换到航路点4时打开DED的STPT页面。你可以查看页面中的LAT(纬度)和LNG(经度)来确认航路点4的位置信息。你会注意到些细微区别。简单来说,1°纬度(在大圆经线上测量)等于60海里。地图上标记的WOLF进近点和4号航路点的差为1分的纬度和0.15分的经度差。当转换成海里时差距约等于1海里。这种轻微的差别是由于Falcon中的“平面”地图投影引起的。

你可以使用STPT来更改每个航路点的经纬度。让我们将现在的航路点信息改为地图上的航路点信息。
按下UFC的向下键来选中LAT(纬度)行。从4.33开始,我们首先要先输入方向符号(N E S W)对应UFC上的(2 4 6 8)键。若不输入方向的话则无法输入剩余的数字坐标。
首先,先按下2 键来输入“北”(N),然后输入3,5,5,7,9,9,0并按下“ENTER”。此时LAT(纬度)行将会变成新的纬度信息,现在请再按下UFC的向下来选中LNG(经度)行。
按下6来输入“东”(E),然后输入1,2,7,5,0,0,2,9并按下“ENTER”。此时LNG(经度)行将会变成新的经度信息。此时经纬度输入已完成。你也可以移动到“ELEV”(高度)行根据自己需求来更改。
当上例的改变生效时你可能很难注意到航路点差别。虽然两组数据误差很小,但是HSD上航路点符号的位置也已经被移动了
F-16的自动驾驶系统还可以在飞行员忙于其他工作时用来驾驶飞机。F-16的自动驾驶系统非常可靠,具有不同的操作模式:PITCH HOLD(俯仰保持)、ATT HOLD(姿态保持)、ROLL HDG SEL(滚转航向)和STRG SEL(航路点)。
在本次训练中我们非常感兴趣的模式是STRG SEL(航路点)模式,它可以让我们沿着惯导路线飞行。它必须与我们在上文讨论的航路点自动切换功能一起使用,这样当达到当前的航路点时,自动驾驶系统才能导航到下一个航路点。未设置自动切换航路点将会导致飞机到达现在的航路点后一直围绕此点盘旋直到飞行员手动切换航路点。
在开启自动驾驶前有以下几个前提条件,在 Dash-1 文档中同样有记载。
- 起落架收起
- 加油盖未打开
- ALT Flap switch(备用襟翼开关)未切换到EXTEND(展开)位
- 攻角未超过15°
- DBU未接通
- MPO未设置为OVRD
- 在PFL信息面板未出现A/P(自动驾驶)失效和FLCS(航电)失效信息
- TRIM A/P DISC开关未设置为DISC
- 失速警报未在运行
将左AP开关设置到STRG SEL并将右侧AP开关设置为ALT Hold。此时自动驾驶将会启用(满足上述条件的情况下)并接管飞机姿态。你可以在任何时候移动摇杆来接管姿态控制,但是也请注意要是以上条件有一点不满足时自动驾驶将会自动关闭且在HUD上出现警告信息。
当AP开关位于STRG SEL时,飞机会向着HSI在NAV模式指针指向的航路点方向飞行。它同样也会对风偏进行补偿。接近航路点4后航电将会自动切换到航路点5并朝此方向飞行。我们可以在关注空速的同时专注于航空电子设备。

让我们看看HUD上右下角的信息区。航路点 5为当前活动点,距离为40.7Nm。预计到达时间(ETA)为1043和23秒猎鹰时(Falcon time)。此行可以根据TOS子页面的数据显示 ETE(预计飞行时间)或ETA(预计到达时间)。让我们点击UFC上的5键进入CRUS页面。按下UFC的方向键右来回顾一下所有可用子模式:TOS(Time Over Steerpoint)(到达导航点时间)、RNG(Range)(距离)、HOME(返航时间)、EDR(Endurance)(续航时间)。我们现在选择TOS页面。
根据是否选择TOS页面,HUD将显示所选航路点的ETA(预计到达时间)或ETE(预计飞行时间)。

当未选择模式时,只有CRUS行的星号会高亮显示。例图中为高亮显示,HUD显示ETA。请注意,当选择TOS模式时,它会以绿色突出显示。DED的TOS子页面给出了当前时间(system):10:39:25,DES TOS(计划到达航路点时间):10:45:17,ETA(基于现在时间和现在的速度计算出的预计到达时间):10:43:23、RQD G/S(以计划时间到达航路点所需地速)为:415KTS。
现在的速度为465 CAS。让我们将HUD的速度标尺设置为地速模式,请使用位于右控制板上的HUD面板来设置。我们实际上的地速是619 GS:204节(速度过快)。注意HUD空速刻度底部的TOS空速插入符号。要飞行TOS,插入符号必须与你当前的空速标记对齐;我们应该放慢速度。但是与其降速到地速415节我们不如修改所有航路点的预定到达时间提前一分钟并通报Rolex(调整计划时间)。Rolex调整会影响整个航路点计划,常用于整体的飞行计划需要提前/推迟时使用。你可以使用DED的 TIME页面。



想要调整时间请按UFC左方向键返回CNI页面,然后按下UFC上的ICP6键。
按UFC上的方向键下将光标移动到DELTA TOS行。输入0,1,0,0,并按下ENTER将信息输入到航电中。第一个输入的数字0代表负号。1,0,0代表1分钟。

我们回到CRUS的TOS页面。你可以看到DES TOS行已经变成了10:44:17。比原计划早了1分钟。现在我们的速度还是有些快,但是我们现在已经能够将速度降到地速486节并将速度指示符对上插入符。
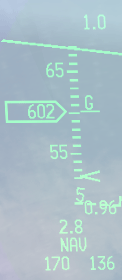
未调整速度
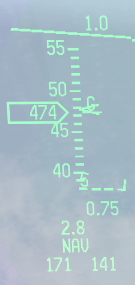
已调整速度
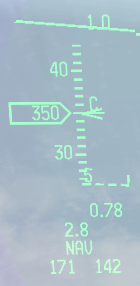
CAS速度



上面的三幅图说明了如何将速度调整到TOS指定速度上。左图为调整了DES TOS后的HUD速度信息。此时我们的地速为602节,速度仍然过快,无法按预定时间到达航路点。
中图我们已经将速度降为地速474节且对应上了插入符指示的推荐速度。我们将在之后调整速度显示开关到CAS。
右图显示了我们现在的KCAS(校准空速节)为350,我们将以TOS时间到达航路点,此时我们仍然维持速度在推荐速度上。
经过航路点5时我们的飞机仍然工作在自动驾驶模式下,飞机将自动朝向航路点6飞行。现在是时候将INS导航模式切换到塔康导航模式了


Muan机场拥有VORTAC导航站,它的工作范围为40海里。现在让我们飞向Muan机场。选择DED的T-ILS页面并输入Muan的塔康信息:065X。检查INSTR MODE已经设置为TCN并观察你的HSI。此时HSI上的OFF旗消失,说明我们已经进入了Muan的范围。相对方位指针现在指向约257°,显示距离为23(.4)Nm。
自动驾驶现在仍然工作在STRG SEL模式下,现在我们将自动驾驶模式改为ROLL HDG SEL模式,然后调整HSI的左旋钮使飞机自动朝向塔康方向飞行。
飞机将立即开始向右转,以与HSI上的航向标(右侧截图上的黄色航向指示线)对齐。你可能需要再次调整黄色航向指示线让其对准指向塔康的方位指示线(蓝色箭头)。
在距离塔康信标4海里时,方位指针(蓝色)将会开始偏向一侧。请记住我们现在高度为FL200,即海拔约3海里。
DME(测距仪)显示的是斜距,因此在这个高度,飞机通过台站时斜距刚好等于高度,即3.5海里左右。这就是为什么方位指示器在HSI上会在DME仍然显示3或4海里的情况下快速切换到6点钟位置的原因。
现在是时候返回基地(RTB)了。在本任务中油耗并不是问题,但是经常检查剩余油量是一个应该养成的好习惯。
请记住在Musan基地西部的那些MOA区域仍然处于启用状态,我们应该回避那些区域。请将AP开关都跳到OFF位来关闭自动驾驶并转向090°方向,我们将返回初始航线以避免进入MOA19。

一旦重新回到航线上,请选择航路点7(JULOP),这是本次任务的最后一个航点。TACAN 仍然设置为Muan,所以我们需要切换回KUN TACAN 75X并检查HSI,它应保持在TACAN模式。
我们现在可以开始下降了,我们将以2800英尺高度飞跃JULOP航路点。下高要比爬升更简单,收油门到怠速位,FPM将会很明显的开始朝下移动。
让你的座机不要在下高时加速太快。让速度保持在空速 350-400 节范围。最难的部分是知道几时该下降。在选择到了降落航路点且菱形标已经出现在HUD时,等到菱形位于HUD的俯角7°左右时便是下降时机。
在下降至过渡层(transition layer)FL140时,使用COM1页面将UHF无线电切换回292.65的Gunsan Approach频率(如果已更改),并通过ATC菜单请求QNH(或在VHF上收听ATIS)。一旦获得QNH,请将其设置在高度表的气压窗口中,并继续下降至2800英尺。

Congratulations, you are now able to navigate using the INS and TACAN stations!

注释
ETE为为飞完整个路程所需时间,ETA为预计实际到达时间。