4.3 空对空(Air-To-Air)
阅读
2024-05-19更新
最新编辑:glamcurrent
阅读:
更新日期:2024-05-19
最新编辑:glamcurrent
本章将介绍空对空类型的导弹、空对空战斗及其相关操作和显示
4.3.1 空对空导弹类型及其介绍
导弹(missile)可以分类为制导与非制导。非制导导弹遵循运动规律,并沿着弹道轨迹飞行。另一方面,制导导弹又可以分为追踪制导(homing)和非追踪制导(non-homing),追踪制导导弹可以追踪目标或者沿着预定的非追踪路径飞行。非追踪制导导弹进一步分为惯性制导(INS)或预编程制导(pre-programmed)。追踪导弹可以分为主动制导、半主动制导和被动制导。

主动制导(Active)
主动制导导弹自带雷达信号辐射源。它可以自行向目标发出雷达信号,信号在被目标表面反射后又重新被导弹接收,导弹通过这些反射回来的信号来定位目标。最典型的主动制导导弹便是AIM-120。
被动制导(Passive)
被动制导导弹依赖于目标本身辐射的信号或者是捕获来自导弹本身以外的辐射源。这种辐射源通常位于红外频段(IR),就如AIM-9的工作模式。辐射源也可以是可见光频段,如AGM-65的光电版本的工作模式那样。当然,被动制导也可以工作在微波频段,如反辐射导弹(ARM)
半主动制导(Semi-Active)
半主动制导导弹的工作模式兼具主动制导和被动制导导弹的特征。它依赖于外部辐射源,通常辐射源来自发射平台上的机载雷达向目标照射后反射回来的信号,导弹通过接收反射信号来定位目标位置。AIM-7便是经典的半主动制导导弹之一
制导类型
制导的定义是让导弹转向目标/被引导转向目标的方法。该定义涵盖弹道导弹,弹道导弹依靠重力等自然力来确定其弹道。这通常被称为弹道制导。对于弹道导弹,弹道导弹是通过执行一种最小化瞄准误差的发射前设置来完成弹道导弹的制导。
另一方面,制导导弹会在发射后继续进行制导行为。发射后的制导动作可以修正发射前瞄准时存在的误差的影响。因此,发射后制导的主要目标是降低发射前的要求,根据目标的运动调整自己的运动方向。发射后制导的实现方法有很多种。下面的内容将会介绍一些值得了解的制导方法。

前置追踪(LEAD PURSUIT)
在前置追踪中,在发射导弹/炮弹时,飞机的飞行矢量将相对目标形成一个角度。这个角度可以使飞机在此飞行路径的任意位置上发射的导弹/炮弹都有击中目标的可能,只要导弹/炮弹的射程能够到目标。
前置追踪需要飞行员解决飞机的机动与导弹/炮弹弹道间的协调。采用前置追踪时,飞机可以在导弹路径前维持优势位置,并对准目标预计飞行路径上。前置追踪可以增加精度和对预期目标的击毁成功率
偏置追踪(DEVIATED PURSUIT)
发射后,导弹将会持续跟踪目标并生成对应的制导指令来保持一个固定的前置角度(I)。当前置角变为0时,即变成纯追踪。然而,由于随机误差与意外偏差的影响,追击角度也将出现偏差。发射平台本身在有偏差的追逐路径上飞行本身就很常见。
纯追踪(PURE PURSUIT)
纯追踪是一种飞机/导弹的特定飞行路径,进行直线飞行,其唯一的目标是与目标相撞(对于飞机“碰撞”可以是侧面靠近伴飞或者是到敌机尾部发射导弹)。在此种方式中,追踪者不会进行规避机动或进行飞行偏航。飞机/导弹运动矢量永远指向目标,以确保可以直接撞击目标。纯追踪的概念强调刻意且毫不妥协地追求对预定目标的撞击。
前置撞击(LEAD COLLISION)
前置撞击指的是拦截机直线飞到特定的导弹发射位进行拦截的动作。前置撞击的目的是将拦截机置于在相对目标最佳的位置上,以便进行有效和准确的使用导弹来拦截敌机。
在前置撞击中,飞机需要计算出超前角和飞行路径,以保证路径可以到达理想的发射位置。该航线经过精心策划和执行,以达到理想的拦截点,最大限度地提高与目标成功交战的机会。通过在前置碰撞航线上飞行,发射飞机可对自己的位置进行战略定位,以便从预定射击位置进行拦截射击。
指令导引(COMMAND GUIDANCE)
在交战期间,发射导弹的飞机持续监视目标状态和导弹状态。机载雷达会对导弹飞行路径进行分析,以保证导弹处于拦截目标的正确路径上。如果机载航电发现导弹路径有偏差或错误,那么飞机将会向导弹发出精准的转向指令。
这些转向指令在导弹开启主动搜索之前会一直传输到导弹。这些指令的目的是调整导弹的飞行路线,使其能对准目标。通过这些对导弹运动的主动调整指令,导弹才能如愿的进入主动搜索阶段并执行有效拦截。宿主机的航电和弹载航电的这种互相合作是完全实时进行的,这大大增加了成功拦截的可能。
乘波导引(BEAM RIDER)
导弹发射机使用V形波束持续跟踪目标,导弹沿波束底部飞行。这种引导方式可以保证导弹持续的对准目标。如果导弹偏离V形波底部,则弹载传感器电路会启动并主动探测出现的误差,将导弹修正回正确位置上。
只要飞机能够持续的跟踪目标,导弹持续的维持在波束底侧,导弹路径就肯定会与目标相遇,从而实现拦截。导弹发射机,导弹和雷达波束之间的持续跟踪和路径维持确保能正确拦截目标。
比例导引(PROPORTIONAL NAVIGATION)
该引导方式旨在根据瞄准线 (LOS) 的角速率 (Dl) 连续调整超前角。此方式的主目标是保持指向目标的瞄准线(LOS)的零角速率(Dl)。这样便能保证目标永远在导弹瞄准线(LOS)之中
超前角会根据瞄准线(LOS)的角速率(Dl)按比例主动调整。如果 LOS 出现误差或出现任何角速率,则相应地调整超前角,以抵消偏差并使角速率归零。这种对超前角的连续调整可确保目标始终位于LOS之中,从而最大限度地减少偏差,提高追踪精度。
该引导方式的最终目标是通过保持稳定的 LOS 和零角速度来实现精确跟踪,从而实现最佳控制和和对目标的拦截。
4.3.2 空对空战斗
航电系统为空对空战斗提供了不同的控制方式,包括:抬头显示器,多功能显示屏和手不离杆系统等。而重要的航电组件又包括:雷达,目标吊舱传感器(TGP),M61A1航炮,AIM-9导弹和AIM-120导弹。本节全面讨论了空对空作战中涉及的各种模式、传感器和武器,以及相应的显示。在适用的情况下,还提供了与空对空武器模式有关的具体步骤和注意事项,以确保切实可行并最大限度地提高效率。
对于每个要使用空空导弹攻击的目标,都存在一个MOI(Missile Of Interest)(类似于SOI的概念)对应该特定目标。我们将使用“MOI”这一词汇来描述诸如导弹剩余时间,A/F pole距离和MFD上导弹开机时间等这些导弹指示与参数所对应的导弹。这些显示的信息都与MOI导弹的状态和属性直接相关。要注意的是,如果当前没有导弹飞向指定的目标,那么此目标便没有MOI与其相关。
在多枚导弹同时攻击同个目标的情况下,那么会存在一个优先级推算方案来计算出哪枚导弹为MOI。该优先级推算方案包含三个级别,现在以最高优先级到最低优先级依次列出:
- 武器类型:按导弹种类选出MOI导弹
- 输/赢状态:按交战状态/结果来选出MOI导弹,不论是有利(胜利)还是不利(失败)都会影响到对MOI导弹的选择
- 剩余时间:如果仍然存在多枚武器类型和输赢状态都相同的导弹,那么将按导弹的撞击倒数时间来选出MOI
通过此MOI选择方案,航电便可将相关性和决定性最高的导弹作为MOI并显示其相关状态,以便在空战时能有效的对导弹态势进行监视和决策。
空对空战斗子模式
航电系统提供了三种预设的空对空子模式,每个子模式在空战中都有特定的用途。每个子模式都可以单独选中,从而能够根据需要的武器类型进行灵活配置,三种子模式分别如下:
- 机炮与火控跟踪模式(DGFT,Dual Gun and Fire Control Track)
该模式可以同时选择导弹和机炮。它能够对空空交战时对武器系统执行完全的控制,你可以在此模式下使用机炮和导弹进行联合攻击 - 空对空导弹/导弹超控模式(AAM or MSL OVRD , Air-to-Air Missile or Missile Override)
此模式下只选中了空对空导弹,此模式侧重于使用导弹攻击空中目标。此模式提供了对空空导弹的专门控制 - 机炮模式(GUN)
此模式正如其名字所述,是专注于操控机炮的模式。此模式可以让你在手不离杆的情况下选中机炮,并提供了增强型包线机炮准星(EEGS)用于瞄准。此模式自动将航电系统设置为适合机炮战斗的配置。
在这些子模式下,你还可以对雷达与武器进行微调来进一步定制这些子模式以应对不同的目标。通过整合不同的主模式,航电系统可以在为远距离交战配置和近距离交战配置之间轻松切换。所有的主模式如下:
- A-A(空对空)主模式:
此主模式可以使用飞机内的集成式控制面板(ICP)进入,也是作为空战的主要模式之一。在AA模式下,你还可以选择以下的子模式- 空对空导弹模式(AAM):
专注于使用导弹进行对空战斗 - 机炮模式(GUN):
专注于使用机炮和使用EEGS准星进行对空战斗
- 空对空导弹模式(AAM):
- DGFT(狗斗)模式:
通过油门上的超控按钮进入,此模式专用于在视距内狗斗的情况下使用 - MSL OVRD(导弹超控)模式
同样是用过油门上的超控按钮进入,此模式专注于对导弹使用的超控模式
飞行员通过切换不同的主模式和子模式,航电能在空对空作战中提供多功能性和适应性,以确保在特定的战斗场景中实现最佳性能。
空对空战斗中与机炮相关的模式
DGFT和GUN模式专用于手动或雷达跟踪模式下的机炮战斗时的符号与功能。DGFT可以使用位于油门上的DGFT/MSL超控开关手动选中。而GUN模式可以在进入了A-A(空对空)主模式后在MFD的SMS界面上点击OSB 1按钮进入。在机炮模式下,增强型包线机炮准星(EEGS)将会激活。本节将概述 EEGS 空对空机炮格斗子模式,包括其相关的显示信息和控件。 为了确保机炮能正常工作,你需要载入正确的弹药类型信息,弹药信息由助记符 PGU28 表示。 可以通过DTE页面的MDDE子页面来完成。
机炮页(GUN PAGE)

机炮评估功能(gun scoring)可以通过按下位于SCOR注记符旁的OSB 20按钮来进行切换。所选择的SCOR模式在模式切换和通电切换时维持激活状态:
- SCOR ON
激活评估功能。子弹与目标距离(BATR)将会显示 - SCOR OFF
评估功能未激活 - 空白
机炮评估注记符只在狗斗超控或AA主模式下的GUN子模式时显示
机炮状态显示在邻近 OSB 6 的 GUN 助记符左侧,如下所示:
- RDY(准备完成):
已打开保险并随时准备开火 - SIM(模拟模式):
机炮保险关闭。但仍然显示相关的符号等信息用于模拟训练 - 空白:
机炮不可用
在MFD的SMS页上位于GUN字符左侧的数字代表了当前机炮子弹剩余量(数字乘10)。在发射出最后一枚炮弹后,机炮系统将会自动关闭。此时的MFD会将字符“RDY”替换为“SAF”(保险状态)。在发射完机炮后,机炮需要一定的时间来清除弹药以安全的解除启用状态。
请注意在截图中SMS并没有载入任何的空对空导弹信息,空对空机炮可在AA主模式或DGFT超控模式下激活。在MSL超控下机炮将完全不可用,此模式下也无法切换进入机炮子模式。
狗斗超控模式(DOGFIGHT,DGFT)
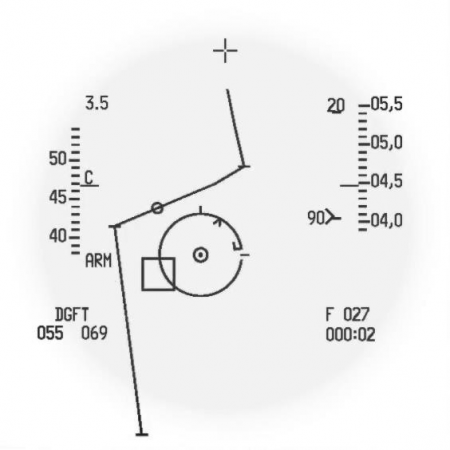
你可以使用位于油门上的狗斗(DGFT)/导弹(AAM)超控按钮选中狗斗超控来激活机炮与导弹并显示其相关信息。在选中狗斗超控后,狗斗超控模式的武器投放模式将覆盖之前选择的武器投放模式。HUD上将会出现“增强型包线机炮准星”(EEGS)相关的符号与“姿态感知弧”(AAA)相关符号。
狗斗超控模式SMS页

狗斗超控下的短程导弹(SRM)


在 DGFT 模式下,HUD 显示的导弹符号与AAM超控/MSL子模式下的不同。HUD上将不会显示导弹标线,可接受转向误差环和攻击转向提示符。取而代之的是位置固定的一组符号且无任何可用的防拥设置。此时目标指示框(TD box)也将消失,取而代之的是EEGS的TD弧。动态发射区和方位角将会自动显示出来。类似于导弹模式和MRM超控模式下的棱形导弹指示符将会可用。HUD上的瞄准符只有在MFD上的SMS出现 RDY 或 SIM 注记符,且 HUD 上也显示为 ARM 或 SIM 时才会出现。在 DGFT 模式下,无论主武器保险(ARM)开关位于哪个位置,HUD 上都将始终显示 "姿态感知弧"(AAA)。
狗斗超控下的AIM-120


在狗斗超控模式下会显示姿态感知弧(AAA)和地平虚线(GHL)。AAA/GHL都为固定符号且不会被风和飞机偏航所影响。这些符号围绕HUD的总视场(TFOV)自动滚转稳定。这些符号给飞行员提供了对自身飞机姿态的感知能力
弧线代表地面,而虚线则代表地平线。当飞机机翼水平(俯仰 0 度)时,弧线显示为一个完整的半圆。在倒飞的情况下,HUD 视场 (FOV) 顶部会显示一条倒弧。
增强型包线机炮准星(EEGS)
EEGS子模式为目视跟踪目标提供了机炮瞄准解决方案,并会在获得距离、速度和加速度数据后修正瞄准精度。EEGS的算法分为5个不同的等级,每个等级都与雷达所提供的目标数据和训练等级相关。该算法经过了专门的设计,当目标的距离,速度和加速度已经有效且可用,例如数据的滤波算法已经稳定下来时,算法将自动启用对应的跟踪等级。

EEGS 漏斗线

如果雷达没有建立目标跟踪,EEGS会在HUD底部显示漏斗线和多参考准星(MRGS)线。漏斗线的宽度对应DED上按下"LIST 5"对应的页面(MAN)所输入的翼展宽度。为了获得最佳的射击解决方案,请使用漏斗跟踪目标,使其翼尖接触两侧的漏斗线。当扣动扳机时,射击评估显示系统(FEDS)将模拟弹显示为对称点,这些对称点沿着漏斗的侧面向下移动,就像发射曳光弹时移动的方式一样。MRGS 线有助于实现高 LOS 率快照。将目标放置在其中一条MGRS线上时,目标会飞过机炮准星,如果开始射击的时间足够早,目标就会飞经子弹行进路线,从而命中目标。

EEGS瞄准方案

扣动扳机后,一个 6 密耳的圆圈会显示子弹穿过目标时的预定位置。这个 "子弹到达目标射程"(BATR)符号用于帮助评估你的射击效果,当锁定目标时,它将代替 "FEDS "显示出来。当连发的最后一颗子弹通过目标位置时,该符号就会消失。

EEGS BATR

锁定目标后,目标上方会出现一个目标指示圈。该圆圈逆时针旋转,用于显示12000ft范围内的目标距离。在目标锁定后不久,雷达会获取到目标速度,然后将机炮漏斗沿目标运动平面对准。MRGS线也会跟着消失。
其他的一些符号也会跟随一同出现。机炮漏斗内的加号为1G过载的标尺,代表无机动目标的准星。负号为最大过载标尺,代表目标向你拉动7.3G过载时正确的提前量准星。在加号的两侧是表示目标在平面外的潜在机动性,即目标在你的子弹飞行时可能的横向移动距离。
距离锁定目标过后的几秒后,雷达会得到目标的加速度信息,若目标进入射程,HUD上会出现一个大小为4密耳的圆圈,如果目标继续维持当前飞行航线,此圈便是正确的提前量准星。

SNAP准星

Snapshot(SNAP,快照)准星:此模式会显示一个蛇形枪线,代表了之前发射的子弹路径,类似于EEGS模式下未锁定敌机时显示的漏斗线一样。水平刻度分别对应于0.5、1 和 1.5 秒前子弹发射的位置。
如果雷达未建立目标跟踪,一个小型圆圈会显示在子弹导弹预定距离时的位置(700或1500ft,由油门上的手动距离旋钮控制)。当锁定目标时,圆圈显示的是子弹位于目标射程内时的位置。
SNAP准星是最难使用的准星模式,因为此模式只显示先前数据(之前的子弹在哪里发射),而不是预测数据(应该在哪射击以便击中目标)。想要命中目标,你必须在一个子弹的飞行时间(BTOF)内使用蛇形线跟踪目标,或者在你认为的目标会在一个BTOF时间内会经过的位置上射击。
接下来要介绍的是前导计算光学准星(LCOS)。在没有锁定的情况下,该瞄准镜的尺寸与设定范围(700 或 1500 英尺)内的目标翼展相匹配,其行为类似于二战或朝鲜战争时期战斗机上的陀螺仪瞄具。其显示的提前量为目标在与你处在同一运动平面上时以同一速度,同一过载运动时的提前量。若这些运动要素间存在差异都将导致准星不准确。
当目标被锁定后,在雷达获取到目标加速度后,机炮环将会短暂的跑到机炮准星位置,然后将再次移回到原来的位置上。现在,机炮环的外圈代表的是目标距离,其"Range L"(L形距离标识)与EEGS TD圈一样展开。超越(Overtake)插入符用于表示接近率:标识位于12点钟时代表 0 接近率,位于右侧则代表正接近率,左侧则代表负接近率。每一刻度代表100节速度,因此超越插入符位于3点钟位置时代表接近率为300节,而符号位于6点钟时代表与目标的接近率超过正负600节(例如两机相向飞行时)。一条从圆圈中心延伸出来的滞后线(Lag Line)代表机炮环的移动方向 - - 在机炮环未稳定前射击会导致脱靶。

LCOS准星

最后要介绍的一个准星是SNAP和LCOS的结合体,SSLC准星。它同时会显示蛇形枪线和LCOS准星(无滞后线)在HUD上。使用LCOS的机炮环来瞄准,然后用SNAP的蛇形线评估射击效果 - - 当子弹击中目标时,蛇形线应刚好覆盖到目标
SNAP & LCOS

机炮准星的使用注意事项
不要忘记机炮十字准星!!!不要试图让机炮环套到目标上,而是要集中精力在目标前方的运动平面上建立机炮十字。然后在此基础上进行微调,再将机炮环套在目标上。
为了防止抖动并补偿雷达锁定时的误差,所有的机炮环都有0.25秒的稳定时间。这意味着想要击中目标的话,你必须在射击前的0.25秒用机炮环跟踪目标,或者在机炮环对准目标前的这段时间内进行射击。
使用机炮十字准星来进行SNAP模式下的瞄准,使用MRGS线或蛇形线来对准目标。由于在前1/4射击时视线率(LOS rate)的快速变化,机炮环的精度会变的非常差。
在战斗中发射机炮的机会非常的少。因此不要节省弹药以用于对付其他敌机 - - 请对与你交战的敌机进行致命性的点射(1-2秒)后立即脱离以防止被敌机的碎片波及。在脱离目标后,请假设自己已经被新的威胁锁定。你必须具有预见性因为在执行机炮射击时没有时间检查你的6点钟方向
空对空导弹及其导弹超控模式
AAM(Air-to-Air Missile,空对空导弹)模式和 MSL OVRD(导弹超控)模式为发射 AIM-9L/M 和 AIM-9X 等短程导弹 (SRM) 以及 AIM-120 等中程导弹 (MRM) 提供了动态瞄准符和数据支持。
AAM模式可以通过MFD的SMS上的AAM/GUN页面进入,而MSL超控模式可以通过油门上的DGFT/MSL超控开关进入。选择MSL超控会覆盖进入超控前的武器投送设置。
导弹模式下的HUD/HMCS(平视显示器/头盔提示系统)包含最基本的瞄准提示符。它包含了目标指示框,能够框定目标以协助进行目标识别(如果目标位于HUD/HMCS的视野外,则会变成目标定位线和目标定位角)。导弹菱形符号代表导弹的视线 (LOS),同时还包含有导弹十字线和称为雷达天线调整角(CATA)的转向提示符。此外,HUD也将显示动态发射区(DLZ)来指示最佳发射条件信息。
导弹超控模式页
导弹超控模式下的SMS页面

导弹超控页与AAM子模式具有相同的显示和可控制内容,唯一不同之处在于导弹超控只需按下油门上的超控开关就能进入
导弹挂架的选择
当报告的主模式为 "MRM超控 "或 "DGFT",或子模式为 "空对空导弹(Air-to-Air Missile) "时,MMC(主模式控制器)会自动选择适当的空对空武器类型以及已经挂载有对应武器的挂点。该选择基于当前模式,每个模式都会记忆选择,如空对空导弹、DGFT或MRM超控模式。
例如,让我们考虑以下事件:
- 上次选择空对空导弹模式时,选择的武器类型和挂点是挂载在 9 号挂点上的 AIM-9M 导弹。.
- 当前模式为 "MRM超控",1号挂点上挂载的 AIM-9M 导弹是选中的武器和挂点。
- 如果主模式从 "MRM超控 "变为 "空对空导弹",MMC 将自动切换到挂载在1号挂点的 AIM-9M 导弹,而不是9号挂点,因为这是当前选定的武器类型和挂点。
综上所述,MMC 会根据所使用的模式记忆其选中的武器和挂点,以确保即使模式在 "MRM超控"、"DGFT "或 "空对空导弹 "之间变化,也能始终选到适当的武器。
在释放了所选的武器类型后,只要所选的同类型的武器仍有挂载,那么MMC会选中其他挂点的同类型武器。
如果没有同类型武器剩余,MMC会检查同类型武器中是否有卡住的挂点(未能成功发射)。如果存在卡住的同类型武器,那么MMC会选中卡住的挂载了同类型武器的挂点。
另外,如果先前选择的武器类型的所有导弹都已成功释放,如果此时还有其他类型的空对空导弹可用,MMC 将自动选择新的空对空武器类型。这可确保飞机即使在耗尽所有特定类型的导弹后,也始终有合适的武器可随时投入战斗。
总之,MMC会根据剩余数量和是否存在卡住的挂点,动态选择挂载对应武器的挂点。如果之前选择的空对空武器类型的所有导弹都已释放,它还会切换到另一种空对空武器类型。
手不离杆选择空对空武器
- 在空对空(A-A)主控模式下,按下 MSL STEP 按钮少于 0.5 秒,将按顺序(3、7、2、8、1、9)切换与当前选中武器相同的挂点。在 SMS Base 页面上,所选挂点将以高亮的形式突出显示,即使主模式控制器 (MMC) 电源关闭,该选择仍将保留。
- 在 A-A 主模式下,除当前选择的 SOI 为侦察传感器 (RECCE) 外,按住 MSL STEP 按钮 0.5 秒或更长时间,将切换到 A-A 武器的下一导弹类型。航电系统将自动更新 SMS Base 页面 OSB 7 旁边显示的武器符号,代表新选择的导弹类型。如果新选择的导弹属于不同类别,平视显示器(HUD)上也会更新相应的导弹类别。
短程导弹(SRM)的使用
航电系统通过提供诸如确定射程、导引头视轴跟踪、导引头视场、射击提示、转向引导、武器预热和数量状态信息等基本功能,为短程导弹(SRM)的操作提供便利。为帮助确定视场、视距、射程和转向,还提供了各种视觉提示,包括导弹准星、菱形符、线性导弹射程刻度(包含动态发射区)和碰撞天线角(CATA)。

AIM-9导弹概述
AIM-9 导弹是一种先进的超音速空对空拦截武器。它是一种被动武器,依赖目标发射的红外辐射进行引导。导弹发射后,无需进一步制导,飞行员可以在发射后立即机动脱离以躲避潜在威胁。 AIM-9由四个主要部分构成:导引与控制部分(GCS),战斗部,引信和弹体(火箭发动机)。导弹通过脐带电缆与飞机连接,用以提供通信与供电。导弹的运作可分为三个阶段:挂载飞行、发射、自由飞行。在挂载飞行阶段,电力由飞机提供,而在发射和自由飞行阶段,电力由导弹内部的热电池提供。
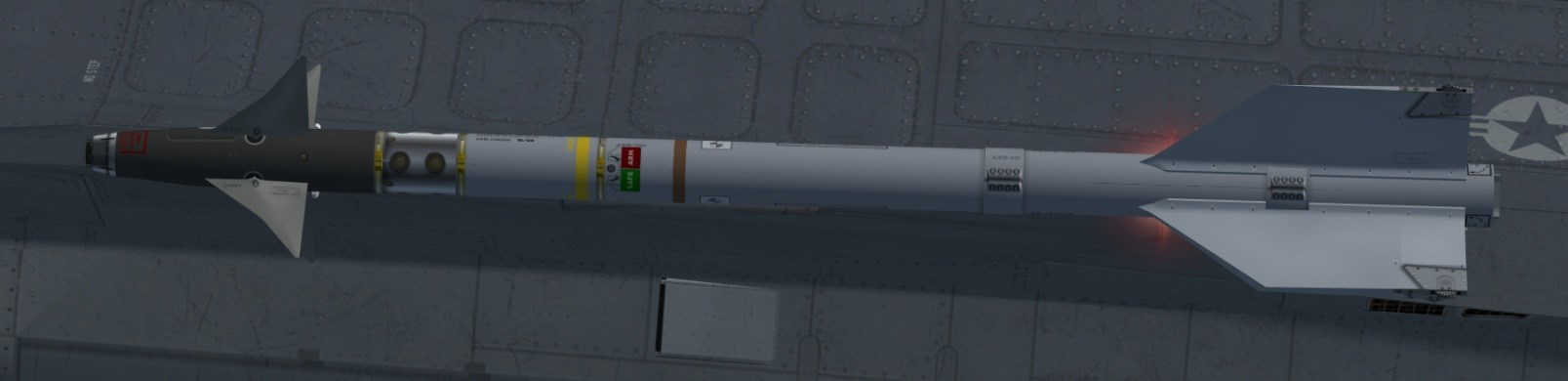
AIM-9M

AIM-9P

AIM-9X



AIM-9 L/M SMS页面

AIM-9P SMS页面

AIM-9X SMS页面

AIM-9 SMS页面 - OSB按钮功能
运行模式(OSB1)
可在三种运行模式间切换:AAM(空对空导弹)、MSL(导弹)、DGFT(狗斗)。这些模式可以在多种对空武器或训练系统间切换和管理。
视觉识别模式(VID)(OSB2)
视觉识别模式用于协助目视获取目标。视觉识别模式可以提供在HUD上显示转向提示来辅助定位目标,如果ID灯可用则能够用于照亮兴趣目标。现在VID模式暂未在BMS中实现。
扫描/点模式(SCAN/SPOT)(OSB3)
通过 OSB 3(On-Screen Button 3)按钮可以在多功能显示屏 (MFD) 上切换 SCAN/SPOT 选项。默认情况下,第一个选择是 SPOT。选择 "SCAN(扫描) "时,平视显示器 (HUD) 将以每秒 1 个周期 (cps) 的频率向导引头万向节引入 1 度的转动。这种转动扩大了导弹的视场(FOV)。如果当时音频处于激活状态,则会以 1 cps 的频率进行振幅调制。另一方面,当选择 "点"模式(SPOT)时,将不应用任何导引头转动,视场仍为圆锥形,这是由对旋转镜进行偏移而实现。HUD 会相应地响应这一指令,在 SCAN 模式下会显示比 SPOT 模式更大的导引头视场符号。SCAN模式必须在多模式计算机 (MMC) 和 HUD 都必须处于工作状态是才可用。
- SPOT模式 - 导引头不会旋转
- SCAN模式 - 导引头围绕视轴进行旋转
INV(OSB4)
按下进入 SMS 清单页面。
CNTL(OSB5)
在选中的导弹可用的情况下按下此按钮进入控制页面
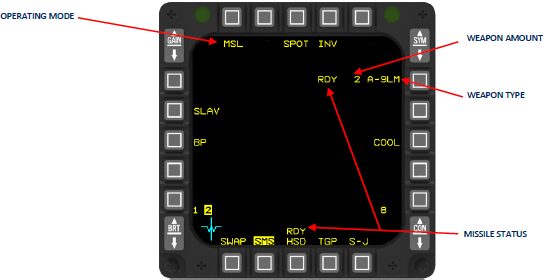
武器类型、数量和状态(OSB7)
库存中剩余导弹的数量显示在所选导弹助记符的旁边。当 "主保险"(MASTER ARM)开关设置为"Master ARM"(打开保险)时,每次释放武器后剩余导弹数量都会减少。但是,当 "主保险 "开关处于 "SIMULATE "位置时,数值不会减少。按下导弹类型符号旁边的按钮(OSB)后,你可以从清单中选择下列导弹或测试飞行器之一:
| 助记符 | 导弹型号 |
|---|---|
| A-9LM | AIM-9L, -9M |
| A-9P | AIM-9P |
| A-9X | AIM-9X |
在 AAM(空对空导弹)页面上,导弹状态助记符显示两次,以确保清晰度和优先级。第一次显示在导弹助记符(OSB 7)的左侧,便于参考。此外,导弹状态助记符按优先级降序显示在 OSB 13 的上方,每个状态的相关含义如下:
- RDY(准备完成):表示导弹已打开保险并准备好发射。在显示 RDY 提示之前,导弹需要些时间冷却和通信。在发射导弹之前必须出现 RDY 提示。
- SIM(模拟):表示导弹未打开保险,但为训练或模拟目的提供了模拟发射提示。
- REL(释放):这表示已向导弹发出发射信号,代表导弹已做好发射准备。
- MAL(故障):这表示失效或故障导致导弹无法发射。由于遇到该问题,系统将禁止发射此枚导弹。
- Blank(空白):这表示导弹没有打开保险,也没有提供发射提示。这表示导弹未做好发射准备。
通过显示这些状态助记符,飞行员可以快速评估 AAM 页面上导弹的准备状态和工作状态。
Cool(冷却)/WARM
导弹在无电源供应的自然状态下称为 "WARM"。在 DGFT 或 MSL 超控模式下,当Master ARM(主保险)为Master ARM位时,且进入对空模式后首次选择 AIM-9L/M 导弹时,会自动发出 "Cool "(冷却)指令。在其他 A-A 模式下,选择 OSB 相邻的 "WARM "助记符可激活 "COOL "模式。为使红外感应元件冷却,在向AIM-9供电后,导弹的一个弹簧阀门将会打开。在发出 "冷却 "指令后,它将一直处于激活状态,直到你切换到“WARM”指令或在主起落架放下并锁定的情况下关闭 MMC 电源。当发射时,导弹中的板载电池便会启动并保持阀门打开。