F-15-Dash34 第九章:AN/APG-63 雷达
阅读
2025-08-26更新
最新编辑:glamcurrent
阅读:
更新日期:2025-08-26
最新编辑:glamcurrent
多普勒(PD)攻击雷达主要设计用于空对空战斗。此类型的雷达能够提供有价值的信息,例如目标距离,接近率,天线角度以及角速度,这些信息对于计算所选武器攻击模式所需的参数至关重要。 雷达使用数字技术在视觉传感器显示器(VSD)上生成合成视频数据,以符号形式展示目标。在空对空模式下,雷达采用B扫描格式,展示距离(在APG-63雷达是速度矢量)与航向扫描数据。 雷达的模式控制按钮集中在左侧控制台的一个面板上,而额外的操作控制按钮则分布在油门和控制杆上。

这些雷达由多个可更换单元(LRU)和连接波导组件组成。大部分的设备安装在左前方的设备仓中。 雷达系统之间的主要区别在于其工作模式能力、频率灵活性、灵敏度以及反电子干扰措施(ECCM)能力。可更换单元(LRU)之间的差异如下所述。
主天线从发射机接收高功率射频(RF)能量,并发射聚焦波束以照射目标。
雷达回波经过处理后被传送到接收机,用于目标检测、跟踪和显示。
除信标模式外,天线发射的波束在大部分模式下均为垂直极化。
然而,当选择信标模式时,天线滚转万向节将旋转90°以提供信标模式工作所需的水平极化。
天线包括零点填充喇叭天线和防护喇叭天线。零点填充喇叭天线(Null-filling horn)是一种小型孔径天线,位于主天线上缘,它提供垂直角度极化的广角覆盖。
在AIM-7导弹发射过程中,它会传输部分射频能量以填充主天线图中的零点区域。
主天线和零点填充喇叭天线均作为AIM-7导弹照明与制导的高脉冲重复射频(PRF)辐射的主要来源。
AIM-7导弹照射的另一个信号源是Flood天线(参见Flood模式)。保护喇叭天线(Guard horn)安装在主天线的下边缘,设计用于接收广角射频旁瓣能量。
该信号与主接收器信号进行比较,以减少虚警率。
雷达内置测试(BIT)

雷达内置测试(BIT)系统用于验证雷达性能以及输入到中央计算机(CC)的雷达参数的准确性。与导弹发射相关的所有计算,包括头部瞄准和英式偏差调整,都在中央计算机内执行。中央计算机自身的BIT程序负责验证其操作,并确认依赖雷达输入的中央计算机程序正常运行。
在雷达接通电源后,运行准备测试(ORT)和初始化内自建测试(I-BIT)过程中,BIT窗口将显示消息提示雷达将会在特定时间上线。
雷达控制
雷达控制机构

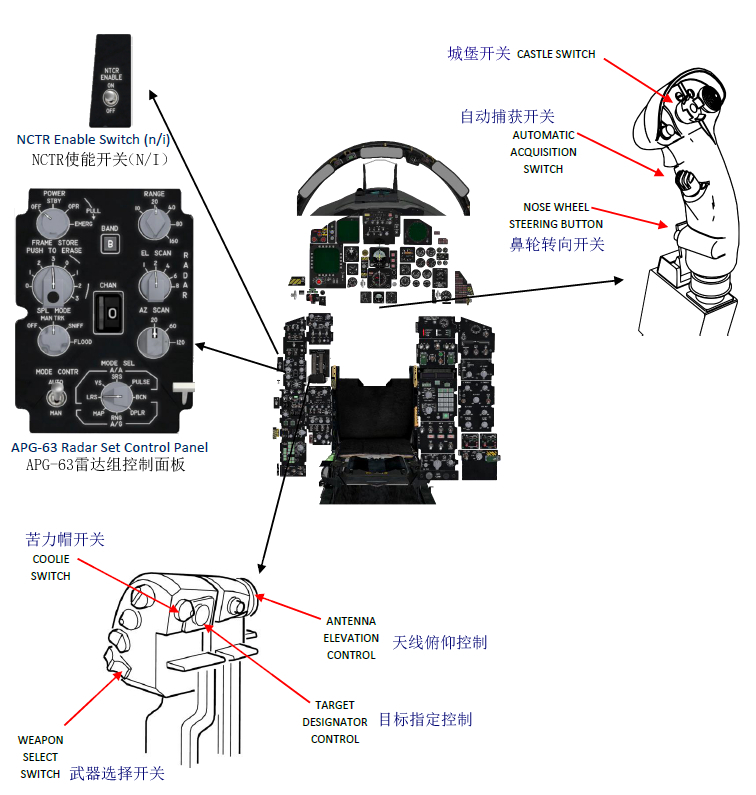
雷达设置控制(RSC)面板

APG-63雷达的多项功能受RSC控制
1 - 电源旋钮
- OFF
- 雷达完全关机
- STBY
- 所有的雷达功能都正常运行,除了发射机高压和射频传输电路。当电源旋钮处于“STBY”模式时,内置测试(BIT)窗口将依次显示“PSP LD”,随后是“081TST”、“042TST”以及其他BIT显示。BIT测试大约在120秒后完成。此时可将旋钮切换到“OPR”模式。
- OPR
- 此时雷达所有功能都正常运行,除非飞机位于地面且W-ON-W内部锁接通。如果OPR模式是直接从OFF模式设置过来,此时雷达系统会先执行之前提到的BIT程序,再让雷达正常运行
- EMERG
- 将会直接让雷达运行,此模式会绕过所有雷达的内置保护锁,除了W-ON-W保护锁和发射机冷却剂流动保护锁。
2 - 距离旋钮
- 距离旋钮可以让飞行员手动选择雷达所的示的扫描距离,可供选择的距离包括10、20、40、80和160(海里)
3 - 频段选择
- 此开关暂无功能
4 - 帧保存旋钮
- 帧保存旋钮可用让飞行员手动调整目标数据在VSD上显示时长。在本文中,一VSD帧的意思是完成当前横向雷达扫描(bar scan)所需的时间。例如,如果选择了4 Bar的俯仰(EL)扫描,则一帧代表的是完整4-Bar的扫描周期。多帧数据老化功能在远程搜索(LRS)雷达模式下尤为有用。值得注意的是,此功能在短程搜索(SRS)模式下也可用。

5 - 俯仰扫描旋钮
- 俯仰(EL)扫描旋钮可以让飞行员手动选择高度扫描的形式,可用的选项有1、2、4、6和8 次俯仰扫描(BAR)。要注意的是TWS模式下此旋钮无功能
6 - 频道选择
- 此开关暂无功能
7 - 特殊选择开关
- 此开关暂无功能
8 - 横向扫描旋钮
- 横向(AZ)扫描旋钮可以手动选择不同的横向扫描模式:30°、60°、120°。要注意的是,在AZ扫描旋钮的20°位置实际上对应的是30°横向角(排序模式)扫描模式,该模式在手册的“Sorting Mode”(排序模式)中有详细说明。在TWS模式下,AZ旋钮提供两种选择灵活性:两条60°扫描带模式(对应旋钮的120°选择位置),或四条30°扫描模式(60°或20°选择位置)
9 - 模式选择(CNOTR)旋钮
- 只实现了AUTO(自动)模式,AUTO模式可以让武器选择开关控制各种雷达设置:
- SRM(AUTO)【短程导弹模式】
- 当选择此模式后,雷达将会进入SRS(近距离扫描)模式。如果是从GUN(机炮)模式进入此模式,则以20海里范围和RSC面板上选定的横向扫描初始化执行6-bar的俯仰扫描。范围限制80海里;因此,除非当前距离刻度大于80海里,否则距离刻度不变。除非RSC面板上的旋钮设置为更大数值,否则默认选择最小的4-bar的俯仰扫描。
- MRM(AUTO)【中程导弹模式】
- 当选择此模式,雷达将会进入LRS(长距离)交叉H/MPRF模式(LRS interleaved H/MPRF mode)。如果是从SRM模式进入到MRM模式,RSC面板上的距离/横向扫描值将不变,俯仰扫描值与RSC面板上对应旋钮值一样。如果直接从GUN模式进入,则测距,横向扫描、俯仰扫描与RSC面板上的旋钮值相同。
- GUN【机炮模式】
- 在搜索模式下,雷达进入机炮扫描模式,并自动确定雷达的工作参数。在机炮的自动获取模式下无法更改参数。从TWS模式进入GUN会使雷达过渡到PDT上的STT(单目标跟踪)模式。
10 - 模式选择旋钮
- 只在LRS(长距离扫描)模式下有用。参见雷达搜索模式部分获取更多信息。
雷达控制(节流阀)

武器选择开关
- GUNS
- 激活20毫米机炮子模式
- SRM
- 激活短程导弹模式
- MRM
- 激活中程导弹模式
天线俯仰控制
天线俯仰控制负责在仰角 ±40° 内定位所选条形扫描模式的中心。但要注意的是,在STT(单目标跟踪)、DTWS(双扫描条(bar)模式)和自动捕获模式下,此控制输出无作用。当控制旋钮向后旋转时,天线仰角向上移动。你可以通过查看VSD左侧边框上的仰角刻度盘和刻度,以及查看VSD高度覆盖数据来观察到这种仰角变化。
天线仰角控制作为一个弹簧驱动的速率控制装置,它可以旋转约±30°,松开此旋钮会自动返回中点中立位置。其逻辑功能类似于目标指定控制键(TDC)的逻辑,它用于控制VSD上的捕获符号。当对旋钮施加固定偏转时,它命令扫描中心高度(在捕获符号范围内)以恒定速率变化。偏转约3°或以下无影响,但在3°到约8°的偏转范围内,命令速率从0逐渐过渡到每秒3000英尺(FPS)。在8°到23°的偏转范围内,命令的扫描中心高度变化速率保持为每秒3000英尺。从23°到约27°的偏转,命令速率线性增加到最大速率每秒15000英尺。
由于天线仰角控制采用速率控制逻辑而非位置控制逻辑,它可以根据雷达运行状况自动调整扫描中心仰角。例如,退出STT时,搜索仰角初始化为目标的仰角,而不是从搜索模式中最后命令的值开始。此外,退出单目标搜索(SS)、条形扫描跟踪(BST)、远程条形扫描跟踪(LR BST)、垂直扫描或自动机炮(GUN)模式时,仰角会重置为零。
目标指定控制(TDC)
TDC在雷达电源旋钮设置为非OFF位时可用。TDC设计作为等距定位装置,它包括一个可按下(depress)的可动开关。通过使用它,你可以调整VSD捕获符号的位置,其移动速度与施加在TDC上的力的大小成正比。 左/右力影响方位角定位移动速度,而上/下力则影响符号的距离改变速率或视觉搜索模式下的距离改变速率。
当按下TDC时(在动作位置),雷达天线将与(目标)获取符号的方位角位置对齐。在任何空对空(A/A)搜索模式下,松开 TDC 都会发出雷达锁定指令。
自动距离切换 - 距离标尺调整(TDC)
雷达搜索或TWS(边跟踪边搜索)模式下
在处于MRM或SRM模式下时,当TDC用于控制VSD屏幕时,如果飞行员将(目标)捕获符号移至VSD屏幕的最上方(99%)或最下方(1%),那么VSD将会自动切换到远或更近的扫描显示距离,同时,采集符号也会移动到显示屏中央。
值得注意的是,当在VSD上处理虚线目标捕获符号时,无法进行量程调整。
STT(单目标跟踪)模式下
当目标位置超出当前显示距离的95%时(或在10海里模式下超出99%),雷达会自动切换到更远的显示距离。相对的,如果目标位置小于显示距离的45%,雷达将会自动选择的显示下一个更小的显示距离。
当从搜索或TWS模式进入到STT模式时,固定存在3秒延迟让自动距离缩放生效。在此时间段内,雷达可以自动按需增加距离标尺以供维持STT。但是,如果TWS或回到搜索(Return-To-Search)模式在这3秒延迟内被初始化,那么距离标尺将不会缩小。
当在空对空模式的STT和MRM子模式下,目标捕获符号出现时,你可以自行改变显示距离,正如雷达搜索模式和TWS模式中讲述的那样。在飞行员手动使用RCS面板切换显示距离后,目标捕获符号会重新定位到当前显示距离的中点。
标准的STT模式下的自动距离缩放会在飞行员手动调整了显示距离时暂停功能,除非雷达显示的目标距离大于或等于当前的100%,此时基于雷达目标距离自动调整显示距离的功能将会重新启用。要注意的是,距离缩放的调整不可以调整到小于当前雷达目标距离的值。
通常情况下,自动缩放功能会在下面的情况下重新启用:
- 从STT模式下回退到MRM模式(移除显示屏上的目标捕获符号)
- 退出STT模式(例如,回到搜索或TWS)后,重新进入STT模式
方位角(范围)缩放
在处于MRM或SRM武器模式下,当TDC隶属到VSD显示器上时,你便可以进行方位角缩放。此缩放基于目标捕获符号在VSD上的方位角位置以及TDC的偏转。然而要注意的是,当VSD上显示的是虚线的捕获符号时,访问角缩放不可用。
当捕获图标移动到VSD左右两侧最极端的角度,且TDC向该方位角偏转时,方位角扫描选择将会按以下表格变更:
| 方位角扫描缩放 | 缩放方位角后的扫描范围 | |
|---|---|---|
| 扫描模式 | TWS(未实现) | |
| 30° | 60° | 60° |
| 60°* | 120°* | 30° |
| 120°* | 60°* | N/A |
注意
当前此功能的实现只能让LRS的az偏移量仅在120°和20°之间交替变化。
当使用方位角缩放方法更改方位角扫描时,VSD上的捕获符号将会回到VSD的中心位置。此功能暂未实现
苦力帽开关(多功能开关)(coolie switch)
苦力帽开关(也可以称作多功能开关)依据当前武器选择开关的位置和雷达模式执行不同的功能
- 如果雷达处于边扫描边跟踪(TWS)模式,苦力帽开关将会执行与雷达TWS模式相关的特定功能
- 如果雷达处于扫描模式,且节流阀的武器选择开关处于MRM位,则苦力帽开关的功能是在MRM模式下于传感器隶属到雷达(SLAVE)和同步AIM-9瞄准孔径(BORESIGHT)间切换。在‘SLAVE’模式下,MRM以普通模式工作;在‘Boresight’模式下,所有的中距导弹将无功能,且攻击符号将会从VSD和HUD上移除。
- 如果武器选择开关选中了SRM,且AIM-9是当前的优先导弹类型(也就是当前选中的武器类型),则苦力帽开关的功能是让AIM-9的传感器在SLAVE和BORESIGHT模式间切换
| 雷达模式 | ||||
|---|---|---|---|---|
| 搜索模式 | TWS(未跟踪目标) | TWS(正在跟踪目标) | ||
| 苦力帽开关按钮 | Coolie Switch - UP | 无功能 | 跟踪雷达的优先目标(PRT) | 步进切换到下一个位于射击列表(shoot list)下的TWS跟踪文件 |
| Coolie Switch - DOWN | 于MRM模式下在SLAVE/BORESIGHT间切换 | 无功能 | 取消对目标的跟踪 | |
注意
在MRM模式,且雷达处于搜索模式时,若误操作COOLIE开关至“下”位置,将使雷达切换至BORE模式,从而阻止中距导弹的发射。此情况可通过HUD和VSD中是否缺少攻击引导信息及DLZ符号来识别。
雷达控制(控制杆)
自动目标捕获开关(AUTO ACQUISITION SWITCH)
自动目标捕获开关(auto acquisition switch)是一个四位开关(FWD,AFT,OFF和DOWN),当你松开此开关时,此开关会自动回中(OFF位)。 下表是在不同的雷达工作模式下,各个开关位置的功能。
- FWD
- - 当雷达处于搜索模式下,此开关位用于在多个雷达自动目标捕获模式间切换(SS,BST,LRBST)
- - 如果处于间指定(获取微光栅,选择未指定目标的高数据速率 TWS(2/3BAR 30°AZ HDTWS)(未实现)
- - 如果处于TWS模式且未指定目标(NDTWS)时,此开关位置用于在3bar和4bar间切换 (未实现)
- - 如果处于TWS模式下且指定了目标,此开关位用于切换3 bar HDTWS 和 4 bar TWS (未实现)
- - 在STT模式下,此开关位用于在 2bar和3bar D/HDTWS间切换(未实现)
- AFT
- - 如果处于搜索模式,则AFT用于选择VTS 自动目标捕获模式
- - 在空间指定(捕获微光栅)模式下,此开关位用于选择NDTWS(2BAR、60°AZ*)
- - 在ND/DTWS模式下,此开关位用于选择雷达优先目标上的STT。
- DOWN
- - 返回到搜索模式(RTS)。它将释放所有锁定的航迹并进入雷达控制面板上选定的搜索模式。
- - 释放空中加油口
城堡开关(CASTLE SWITCH)
当使用 F-15C 操纵杆时,向前或向后推动城堡开关,MPCD/VSD上就会出现一个清晰的捕获符号。 此符号用于提示你当前哪个显示屏受TDC开关的控制。 相反,虚线捕获符号表示当前哪个显示屏你暂时无法控制
在雷达开机或雷达切换至任何自动捕获模式时,TDC控制符号会自动切换回VSD显示屏。
- UP
- 切换TDC控制隶属到VSD显示器/MPCD SIT显示器
鼻轮转向按钮
在处于SRM(短程武器)模式下,此按钮用于锁定(cage)/解锁(uncage)AIM-9
雷达控制(其他)
锁定/发射灯
锁定/发射灯位于座舱盖圆弧拱桥上,它会在以下情况下点亮:
- - 当进入STT雷达模式时,灯常亮
- - 当处于MRM武器模式下,目标距离在Rtr和Rmin之间时,此灯闪烁
- - 当处于SRM模式下,目标距离在Rtr和Rmin之间时,此灯闪烁
雷达模式总览
AN/APG-63雷达为目标捕获、跟踪和攻击的各个阶段提供了多种模式。 在BMS中,其主要搜索模式为远程搜索(LRS)模式,此模式与边跟踪边扫描(TWS)互补,后者可用于同时搜索、跟踪和攻击多达8个目标(使用AMRAAM导弹)。 雷达系统实现了多种自动捕获模式,为飞行员提供了在目视范围内外快速切换至单目标跟踪的手段。
雷达模式参数
自动/手动模式控制(BMS中只实现了自动模式)
| 武器选择开关位置: 从....到 |
雷达距离 (海里) |
横向扫描范围 (角度) |
俯仰扫描 (bar) |
发射器模式 | |
|---|---|---|---|---|---|
| SRM | MRM | 无变化 | 无变化 | RSC(A) | INLV H/MPRF |
| GUN | MRM | 40 | 120° | RSC(A) | INLV H/MPHF |
| MRM | SRM | 无变化 (最大80) |
无变化 | 4Bar (MIN) (A)(B) |
MPRF |
| GUN | SRM | 20 | 120° | 6Bar (2.5° BAR 间隔) |
MPRF |
| SRM/MRM | GUN(C) | 10 | 60° | 20°(6Bar, 3.4Bar间隔) |
MPRF自动捕获 |
注意:灰色代表功能未实现
- INLV
- 交替脉冲重复频率(Interleaved Pulse Repeition Frequency)
- LRS
- 远距搜索(Long Range Search)
- RSC
- 雷达设置控制(Radar Set Control)
- 如果选择了10NM/20NM距离,则俯仰扫描的BAR间隔将会从1°变为2.5°(20NM)或3.4°(10 NM)
- 如果在RSC面板上设置的俯仰扫描大于4-Bar,则按照RSC面板上的设置来初始化雷达扫描
- 搜索参数无法更改。在俯仰/横向轴上的扫描通过TDC定位。在锁定后,可以通过REJECT自动捕获目标(auto acq)
雷达搜索模式
远距搜索(LRS)
远距搜索模式是空对空(A/A)模式下主要的监视手段。在LRS模式下,雷达一般工作在交替模式,模式部署是50%的高脉冲重复频率(HPRF)和50%的中脉冲重复频率(MPRF)。 这说明脉冲重复频率会随着扫描的BAR而变化:第一个BAR使用HPRF,第二个BAR使用MPRF,第三个BAR使用HPRF。以此往复。但是,如果选择了10海里扫描距离,则只会使用MPRF。
在搜索过程中,雷达在刚进入160海里扫描模式时,会采用交错脉冲重复频率。随后,在160海里扫描距离中,雷达会根据交替的测距设置在交错和完全HPRF之间进行调整。
雷达的探测距离的性能高度受多个要素影响,包括目标的横截面(目标反射率)、目标的多普勒情况(目标地速沿雷达视线(LOS)的分量)、地面杂波信号强度(地面反射系数)、
和特定的战术条件比如下视和上视。
在LRS模式下,使用双PRF的目的是在各种条件下最大限度地提高目标探测潜力,包括目标的尾部和正面,无论其位于F-15飞机的上方还是下方。
雷达目标捕获模式
手动捕获目标
手动目标捕获是在监视显示器上的目标捕获符的时,操作目标指定控制开关(TDC)来控制捕获符实现。 飞行员对TDC施加合适的力,让目标与捕获符号对齐。然后按下TDC down发出指令让雷达启动±3°方位角搜索扫描(迷你网格),以捕获符号为中点进行横向搜索,同时在选定的仰角条纹模式内进行搜索。
在1秒内释放TDC将命令雷达锁定目标。在此期间,雷达尝试在捕获符号内与任何存储的目标文件进行相关性匹配,最长持续2秒。如果相关性匹配成功,雷达将自动选择目标探测时使用的脉冲重复频率(PRF)和扫描条。
它在该位置以±3°的两条扫描线进行扫描,持续时间最长为1.5秒。当在捕获符号内接收到第二个实时目标击中时,锁定即告成功。如果在1.5秒内未实现锁定,扫描将自动切换到选定的仰角扫描线数量和相应的PRF交错模式。
常规的长距搜索(LRS)模式的捕获搜索(acquisition scan)和高/中脉冲重复频率交错模式以帧为单位逐帧执行。
若仍未实现锁定,雷达将保持在捕获扫描模式并保持锁定命令激活状态。
飞行员可通过TDC调整天线搜索扫描位置,并使用仰角控制(EL)进行仰角定位以锁定目标。
或者,雷达可通过短暂选择“返回搜索”(RTS)功能切换回已选的搜索模式。
自动目标捕获(AUTO ACQ)
F15C有5个自动捕获目标的模式:超级搜索(supersearch, SS),孔径(boresight, BST),垂直扫描(vertical scan),机炮(GUN),长距孔径(LR BST)。所有的自动捕获模式使用MPRF,除了LR BST模式是使用IPRF。 在所有自动捕获模式下,搜索范围显示为10海里,但GUN模式使用20海里,LR BST模式使用40海里。
SS、BST和LR BST可以模式通过前推auto acq(Stick: Auto Acquisition Switch - Fwd)来切换选择。第一次前推auto acq到forward位置(维持少于1秒)会切换到SS模式;第二次前推到forward时(维持少于1秒,且雷达仍处于SS模式)会切换到BST模式。
下一次拨动开关到forward时(维持少于1秒)时将会切换到LR BST。向后推auto acq(Stick: Auto Acquisition Switch - Aft)会切换到垂直扫描。当在油门上的武器选择开关选中了机炮时,雷达工作模式则会相应的切换到机炮模式
当建立跟踪时,此时你无法切换自动捕获的模式。想要回到搜索模式,飞行员需按下auto acq开关(Stick: Auto Acquisition Switch - Down)。
如果飞行员是在GUN搜索模式下进入目标锁定,那么按下auto acq会回到GUN搜索模式。
若自动捕获尝试未能正确进入跟踪状态,雷达将返回先前选定的自动捕获模式,而非返回搜索模式。
超级搜索(SS)模式
在SS模式下,雷达采用6扫描条对HUD视场(20°×20°)进行扫描,直至建立目标跟踪或选择返回到搜索模式(RTS)。各条扫描线之间的间隔为3.4°。 雷达锁定为自动,且雷达将跟踪在此扫描模式下首次检测到的目标,前提是该目标位于500英尺至10海里的距离范围内。
在刚选择到SS模式时,HUD会显示一个20°的参考圆。当开始角跟踪时,所选武器的显示界面将出现,而TDC则显示的被跟踪的目标的空间位置。