2.4.3 Link-16数据链
阅读
2024-12-06更新
最新编辑:glamcurrent
阅读:
更新日期:2024-12-06
最新编辑:glamcurrent
Link 16背景与简介
Link 16是一个协作式跨国数据链系统,旨在为网络内的入网者提供态势感知数据以及命令与控制功能。 Link 16也被北约称为美国TADIL "J"数据链路标准,被美国国防部(DoD)选定为各军种指挥与控制(C2)、情报和武器系统的主要战术数据链路,作为大容量、安全、抗干扰的战术数字信息链路(TADIL)运行。 通过整合多功能信息分发系统(MIDS)--小体积终端(LVT),在M3配置中实现了对Link 16功能的整合。
Link 16的部署可以通过多种无线电系统实现,包括:联合战术信息分发系统 (JTIDS)、MIDS-LVT和MIDS战斗机数据链 (FDL) ,F-16使用的是MIDS-LVT。
Link 16的集成已经在并将继续在多个不同的平台上使用不同的无线电系统来实现,包括但不限于:美国空军 E-3 机载警戒与控制系统(AWACS)、北约E-3、英国与法国的E-3D、联合监视目标攻击雷达系统(J-STARS,联合星)、美国空军RC-135 (RJ)、战场空中指挥控制中心(ABCCC)美国海军和法国航空母舰、美国海军宙斯盾巡洋舰和潜艇、F-14、F-15C、F-15E/F、F/A-18、模块化控制设备 (MCE)、萨德防空系统(THAAD)和爱国者防空系统、美国科曼奇直升机、台风战机、英国F3狂风战斗机、英国海鹞战斗机、F-22、F-35 联合攻击战斗机 (JSF) 和F-16等。
Link 16的规范已经在美国的MIL-STD-6016和北约的STANAG 5516中进行了解释。这两份文档都提供了对Link 16运作原理的完整描述,包括J-series报文的格式和传输/接收要求。
该标准通过来自用户、集成商和国防机构的接口控制提案(ICP)的要求进行动态修改。
ICP需要空军内部的协调和批准,然后由其他军种的联合变更控制委员会 (CCB) 进行协调和批准,最后通过北约的协调和批准。
这些文件包括描述对Link 16相关的最低部署要求(MIN IMP)的附录。
MIN IMP中规定了某些J-series报文的传输/接收要求,以及Link 16入网者基于其功能的报文内容。
对于F-16,这些功能来自空军司令部(ACC)发布的Link 16操作要求文件(ORD)。
MIN IMP的目标是让Link-16入网者之间保持一定程度的互操作性。
尽管MIL-STD-6016容许Link 16的不同的实现方法和使用方法间的差异,但即使是MIN IMP,空军还是成立了一个工作组来开发针对Link 16操作概念的协调方法。
Link 16空对地工作组(A-G WG)召开了技术交流会议,与会者包括美国空军、海军和陆军的代表、平台集成商、硬件开发商、汉斯科姆空军基地系统集成组织(SIO)/Mitre公司的 Link 16 专家、航空航天指挥与控制局(AC2A/C2FT)、欧洲参与政府(EPG)的高级国家代表等。
A-G 工作组通过各种活动和调查,制定了空军"Concept of Link 16 Employment"(COLE)文件,并于2001年4月13日定稿。
COLE作为美国空军需求办公室和平台系统项目办公室 (SPO) 的框架,确定了COLE的实现策略并了解其对其他平台的影响。
此外,它还保证了在不同平台上对数据链的实现方法能在更大的"Link 16"网络中保持数据同步。
COLE描述了与防空、拦截和近距离空中支援 (CAS) 任务相关的Link 16使用概念,包括参与者角色、数据链架构、整个任务阶段的数据交换以及信息交换要求(IER)。
COLE中还讨论了打击包(strike packages)、情报因素、网络容量、与其他数据链进行信息交换的网关、控制反向链接和MIL-STD-6016 MIN IMP分析等特殊主题。
LM Aero F-16系统设计与特定用户候选系统一起,将COLE和MIL-STD-6016纳入F-16的Link-16功能定义中。
Link 16数据链描述
F-16对Link 16数据链的实现是由一个名为MIDS的专用无线电系统提供支持,此系统在960 - 1215 MHz的TACAN频率范围内运行,并配备了对IFF频率(1030和1090MHz)的滤波器。 此无线电系统拥有抗干扰能力,它可以每秒执行77,000跳的快速跳频,并使用数据加密技术保证安全性。 MIDS安装在AN/ARN-118(V) TACAN航线可更换单元(LRU)的位置上,同时负责Link 16和TACAN的通信功能。
Link 16实现了对多种信息的交换,包括:监视与跟踪文件,电子战跟踪,战机目标,友方位置以及状态更新,它同时通过名叫“J-series”的标准报文格式来支持指挥与控制(C2)功能。
与早期战术数据链(TDL)系统(如 Link 11A、Link 11B和Link 4)相比,Link 16显著的提高了抗干扰性、安全性、网络容量与速度和入网者数量等方面的性能。
与其他存在关键节点的数据链系统不同,即使Link 16的入网者从链路中(非节点)掉线,其广播架构也能支持不间断运行。
Link 16使用时分多址(TDMA)进行通信,为入网者分配特定的时隙或一组时隙用于传输信息。
每个入网者的信息传输在时间上相互分离,从而实现了时分多址。
MIDS想要接入Link 16网络运行,需要知道时隙分配和相关信息。储存在传输数据卡(DTC)上的初始化数据为MIDS提供了所需的网络信息,使用者可以使用驾驶舱中的DED(数据输入显示器)来进行有限的更改。
由于Link 16是一个涉及多平台的跨国数据链,网络设计的管理由网络管理员负责。
网络管理员会收集来自不同平台的数据链路需求,并将其输入Link 16用户数据库。
根据不同平台和战区作战计划确定的需求,采用计算机辅助设计工具进行网络设计。
设计完成后,网络将存储在JTIDS网络库中,以供选择。
网络设计人员从库中选择合适的网络,并向用户群分发网络设计加载文件(Network Design Load,NDL)。
NDL 中提供的参数与特定平台参数合并,生成实际的Link 16终端初始化加载文件。
一旦加载了网络信息,当主机平台的航空系统提供数据时,Link 16终端(F-16 中的 MIDS)将控制网络上的信息分发。
在执行任务期间,可通过主机提供的初始化更改请求修改某些网络初始化参数。
Link 16初始化
Link 16的ID树(ID-Tree)和目标监视归属数据的初始化
Link 16的DTC加载的数据提供了对系统航迹(无论单位是否在MFD相关页面的显示范围内)分类为未知(unknown)、中立(neutral)、可疑(suspect)、敌对(hostile)或友好(friendly)的能力。这些分类有助于建立交战规则。 这组规则被称为ID树(ID-tree),你可以在任务规划期间进行选择,并与其他的Link 16初始化数据一起上传。
此外,DTC加载的空中目标数据表(ATDT)可将飞机类型映射为 "友好"、"未知 "或 "敌对 "名称。ATDT对于飞机监视归属ID树标准至关重要。
ID树和ATDT表在MMC系统通电时持续可用,但若在单个任务循环中激活“weight-on-wheels”(即飞机位于地面上)时将不会保留信息。
进入Link 16 DED页面
在DED的DLNK页面中,你可以在6个子页面中来回切换。在Link 16初始化的过程中,第一页(Net Status,网络状态)将会在MIDS完成自启动程序且MIDS的DTC信息未载入时自动进入。在UFC小键盘上按下“LIST”后按下“ENTER”键将键入此页面。 如果MIDS正在开机,按LIST和Enter(ENTR)键将会显示A-G DL子页面,这个前提是IDM系统已可用。 但是,如果IDM和Link 16子系统都不可用(例如,在 DTC 加载期间),按下ENTR将不会进入任何页面。这侧面说明了Link 16/IDM的页面顺序。

Link 16初始化页面1 - 网络状态(Net status)
此页面显示的是F-16的数据链网络状态,你可按需修改其参数

DED的Link-16初始化页面

GPS外部基准时间
MIDS终端的运行需要网络时间信息,在GPS数据可用的情况下会通过外部基准时间(External Time Reference, ETR)来接收时间信息。 在使用GPS时间来同步Link 16网络时,MIDS不需要使用单独的网络基准时间(Network Time Reference,NTR)来维持运作。 不过,NTR数据可提供入网报文来执行初始化粗同步。
在DTE载入数据时将会告诉MIDS终端是否使用GPS时间。ETR的使用设置与其他参数都包含在NDL的载入信息中。
你可以在“Net Status”(网络状态)子页面中看到GPS时间的开关状态,它同时也代表了DTE所加载的设置。
飞行员可以通过操作DED上高亮的星号光标并按下1到9之间的任意数字键来在GPS TIME ON和GPS TIME OFF之间切换。
如果在基于GPS的任务中,即GPS可用时,则不需要手动输入时间(NET STATUS 页面上的TIME(时间)字段将留白)。
此时任务会使用GPS时间脉冲来维持GPS和MIDS之间的时间同步,此过程由MMC将GPS时间传输给MIDS。
在未来的BMS开发中,将实现JTIDS(F-15C)和MIDS(F-16)GPS时间的同步。
目前,在BMS中关闭或打开GPS TIME暂时不会产生任何效果。
飞行员手动输入时间
飞行员手动输入时间功能暂未实现
网络时间基准(NTR)
网络时间基准 (NTR) 是负责定义网络时间的指定终端。 在最初入网时,NTR时间对于GPS和非GPS模式都非常重要。 你可通过DED的DLNK页面的第一页将本机设置为NTR。 在GPS模式下,当MIDS被指定为NTR且GPS正常工作时,则不需要飞行员进行时间输入。
在未来的BMS开发中,将实现JTIDS(F-15C)和MIDS(F-16)的NTR同步功能。
目前,在BMS中关闭或打开 NTR 暂时不会产生任何效果。
网络同步状态
同步状态(Status)会显示在Link 16初始化页面1上,此字段代表MIDS在Link 16网络上的通信精准度。 FINE是当前BMS版本下的唯一的可显示状态,代表入网者之间的同步成功。 在未来的BMS开发中,还将实现其他状态的功能。
Link 16的入网步骤
- 确认EGI旋钮位于NAV(导航)位
- MIDS - ON(开启)
- MFD的DTE页面 - Link 16选项(短按以进行载入)
- 确认 LINK 16 INIT CHECK 字段显示在DTE页面中
注意:如果LINK 16数据未成功载入,DTE页面将会显示“LINK16 INIT REQD”字段。
- 确认 LINK 16 INIT CHECK 字段显示在DTE页面中
- 在DTE页面中选择LINK 16的文件A/B(按需 - 如果两个文件都可用 -> 长按 LINK 16(OSB 8) 来切换想要载入的文件)
注意:如果文件A或B被更改,请重复第三步 - 确认/修改DED的初始化页面上的Link 16参数
Link 16 初始化页面 2 - Link 16
在此页面中显示的Link 16的各项参数都可以通过加载DTC来初始化。 此外,它们都包含在网络设计加载文件(NDL)中,并且可以在任务规划期间进行调整。 这些设置无法在进入座舱后进行调整,你只能在进入座舱前的UI界面中使用DTC对话框进行调整。

DED的Link-16初始化页面2

Link 16子页面的所有字段的解释如下:
- 战机信道(FC, Fighter Channel) - 战机和战机间网络参与组(NPG)的网号(0 - 126)。一般我们称之为“战机对战机(F-F)网络”。
- 任务信道(MC, Mission Channel) - (任务)管制 NPG 网号(0 - 127,其中127号代表禁用任务管制信道(将PG 9网号设为127来关闭PG 9位置))。
- 特殊信道(SC, Special Channel) - 此信道仅限于美国的网号(0 - 126),用于SEAD任务和识别用 -> 暂未在BMS中实现
- 语音呼号编号(01) - 飞行员的语音呼号编号,两位数(0-99)。
- 语音呼号标签(VI) - 飞行员的语音呼号标签,两位字符(A-Z)。
- 小队领队(FL) - 用于识别自身是否为小队(flight)领队 (YES/NO)。
- 传输功率(XMT) - TDMA传输功率选择(HI)。
战机、任务控制与特殊信道选择
根据功能的不同,TDMA 发送和接收的时隙由其服务的网络参与组(NPG)指定。 当主飞机发送报文时,它会指定MIDS的NPG来传输报文。 Link 16的子网选择决定了分配给NPG的发送和接收的时隙相关的跳频模式。 要发送和接收 NPG 信息,其他Link 16参与者的终端必须运行于同一子网中(具有相同跳频模式)。
在Link 16的初始化页面2中,信道代表的是在各组网络参与者之间是常规的分离还是堆叠。
只有特定的参与者才会被分配到这些NPG的特定子网中,信息在特定参与者中进行共享。
Link 16网络组中的其他成员则在自己的子网中共享信息。
主子网(main subnet)或监视子网(surveillance subnet)(联合数据网 (JDN))传达整体战况,不分层。
JDN 通常分配的信道号为0,在驾驶舱内不可修改。
飞行员无法直接使用DED/ICP来更改信道号,你只能使用进入座舱前的BMS UI界面中的DTC对话框中的Link 16标签来更改
战机信道(FC)会为队内通信(intraflight communications)建立子网络(NPG 19),便于在小队(flight)内共享所属目标。
飞行员可更改FC编号以接收来自不同的战机子网络(fighter-to-fighter subnet)(如:不同的donor)的小队(flight)的目标信息。
小队(flight)内的所有成员必须都设置相同的FC号以保证接收到Link 16的目标分类信息。
任务信道(MC)为 C2 飞机(如 AWACS 或 ABCCC)设置子网。
(任务)管制NPG(control NPG)可以让 C²(指挥与控制)向小队(flight)领队传输任务,并让小队(flight)领队能够进行回应和报告任务状态。
在小队(flight)飞往目标区域的过程中,空中的(任务)管制单位可能会发生变化。
在这种情况下,当前的管制员会向小队(flight)发送移交请求信息,通报新管制员的子网编号(即 MC)。
在接受移交请求后,小队(flight)成员会切换 MC 编号与新的管制员进行通信。
特殊信道(SC)为SEAD NPG建立子网,并提供尚未在BMS中实现的识别信息。
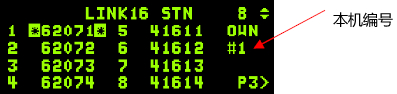
Link 16初始化页面 3 - Link16 STN
Link 16的初始化页面 3提供了队内(flight)成员的Link 16 STN编号信息。你可以在处于页面 2(P2)时按下UFC上的DCS SEQ进入(对应键盘上的方向键右)。
DED的Link-16初始化页面3

Link 16源航迹编号(STN)
Link 16的STN编号由八进制数字的0 至7所组成的五位数构成,此编号由定义NDL的网络管理员专门分配给每个F-16。 页面中的星号高亮光标代表了你当前选择的行,当你按下ENTER键后,光标会自动步进到下一个队员的STN编号。 OWN#字段代表了此STN编号所述的队员在列表中的位置,OWN 1表示编号所属单位为列表中的1号,他的STN编号是62071。
在此页面中输入的STN决定了MMC会从战机信道(FC)和任务信道(MC)接收到什么信息并在驾驶舱中显示。
FC在接收到不在团队成员列表也不在志愿者(donor)列表的STN所发来的信息时将会直接丢弃信息。
前四个STN(#1-#4,直属小队/小队成员)为任务管制信道上C2报文的接收者。
第二组地址(#5-#8)对应于另一个受关注的小队(团队成员)
更改自身所属编号(ownship)
要更改自身的STN所属编号(ownship),请将星号光标移动至"OWN#"字段上,输入一个新的一位数(范围从1-4)。 此更改可以让一位小队成员(1-4)使用另一名小队成员(1-4)的所属编号(ownship)和STN编号。 所有的小队成员都可以按需更改其所属编号。
例如,我们考虑如下一种情况,小队领队(Ownship: #1, STN: 62071)出现了机械故障,需要中止起飞。
一般此时会由队内另一名经验丰富的飞行员担任领队角色(如:Ownship: #3(三号机,小队副领队), STN:62073)。
此时,三号机会将星号光标放在OWN#字段上,在按下ICP上的数字1后按下ENTER。
这样三号机便担任了Ownship #1/STN 62071的职务。

Link 16初始化页面4 - Link16 Donor(DNR, 志愿者)

Donor(DNR,志愿者)
在执行任务期间,为了了解态势(SA),飞行员可能希望监视来自非本小队(flight)或团队(team)的飞机报告的目标。 这类团队外的飞机被称作“志愿者”(donor),你可在任务计划期间指定他们,在座舱内时,其选择与取消选择可以通过DED上“Link 16 DNR”子页面来进行管理。
使用Link 16的飞机会通过PPLI报文定期发送其位置。
当收到志愿者飞机的PPLI报文时,将会在航电中显示对应志愿者的标志。
志愿者的图标会同时显示在HSD和对空FCR页面中,其特征是一个友军符合(绿色PPLI圆)和下方的两位数高度(同为绿色)。
MFD上显示的志愿者机的符合会缩小表示(75%)。
在数据输入显示器(DED)中进行志愿者(DONOR)选择
你可以通过DED的"LINK16 DNR"页面手动输入志愿者信息。按下MFD上HSD页面上的DNR标签对应的按钮可快速进入"Link 16 DNR"页面。 因为不存在飞行员数据链终端(PDLT)的关系,因此无法使用UFC进入。

要使用DED来选择志愿者飞机:
- 按下HSD上的DNR按钮
- 上下移动 DED 光标到所需位置
- 输入5位数源跟踪编号(STN)
- 按下ENTER键完成志愿者信息的输入
- 按上面的步骤继续输入其他的志愿者STN码或者按下DCS left(键盘方向键左)返回CNI页面
快速添加志愿者
选择空中PPLI(flight、支援者或团队成员除外)作为PDLT,然后按下OSB 16(DNR),即可快速添加为捐献者。为此,指定一个新的PPLI作为PDLT,按下OSB 16(DNR)(调用LINK16 DNR DED页面),然后在 ICP 上想要添加到的志愿者栏位号并按下ENTER键。

Link 16 初始化页面5 - CAS任务驻留(on station)报文
数据链的近距离空中支援(CAS)页面可以让 F-16 通过IDM数据链发送待命报文。 在BMS目前的开发阶段,该DED页面无法使用。

Link 16 MFD显示
MFDS对HSD显示友军和非友军转向点施加了限制,以符合系统更新标准。 为了优化传入数据的实用性,在 MFD 的各种页面中都会显示Link 16符号。 其中包括HSD页面和对空模式下的FCR页面上所有的空对空航迹。
Link 16 报文(HSD)
不同的Link 16报文将会被识别以供在战术指挥、战场控制和通信间交换信息。
已实现的Link 16数据链报文
Link 16数据链已实现的报文总结如下表:
| 编号 | 标题 | 描述 |
|---|---|---|
| J0.0 | 首次入网 | 用于首次进入 Link 16 网络。 |
| J2.2 | Air PPLI(空中PPLI) | 空中精确参与者位置识别(Air Precise Participant Location Identification,Air PPLI)是Link 16的网络参与者间传输的信息,能够提供参与者的状态,识别详情,位置数据和相对导航信息。它包括语音呼号、位置坐标(纬度/经度)、高度、航向、IFF 代码、空中平台类型(如战斗机、轰炸机、攻击机)和空中平台行为(如交战、调查(investigating)等)。 |
| J3.2 | Air Track(空中航迹) | 此报文是共享空中航迹的一种方法,主要由指挥和控制 (C2) 机构发布。它包含有关演习/非演习航迹的详细信息,包括航迹编号、强度、位置、速度、航线、身份(如待定、未知、假定友军、友军、中立、可疑、敌对)、IFF 代码、空中平台类型(通用类别,如战斗机、轰炸机、攻击机等)和特定空中平台类型(如 F-15、F-16、米格-29 等)。 |
| J12.5 | 目标/航迹关联报文 | 此报文用于管制C2单位将目标和航迹进行关联、取消目标和航迹间的关联、或者将多个目标关联到同个航迹上 |
| J12.6 | 目标分配 | 此报文由网络群组的参与者进行发送,此报文用于在网络用户和C2单位之间交换目标和分类信息。此报文包含诸如以下信息:锁定、交战、飞行中的导弹/释放武器等事件,其他事件的报文交换暂未实现 |
J2.0与J2.2 PPLI 空中航迹(Air Tracks)
下表表述了小队(flight team)成员(1-8名)、志愿者(donor)和其他的友军单位的PPLI符号。自身的PPLI和空中PPLI接收的刷新间隔由NDL决定(目前设置为2秒)。在两次空中 PPLI 更新之间,PPLI 符号的位置会被推测并维持长达 13 秒,以减少Link 16 更新报文之间显示航迹位置的突然变化。如果 13 秒内未收到更新报文,空中 PPLI 航迹将被删除。
| 显示格式 | J2.0 间接空中PPLI | J2.2 接口单元PPLI(小队/团队)(FLT/TEAM) | J2.2 接口单元PPLI(志愿者)(Donor) | J2.2 接口单元PPLI(友军) | ||||
|---|---|---|---|---|---|---|---|---|
| 锁定目标 | 没有锁定目标 | 锁定目标 | 没有锁定目标 | 锁定目标 | 没有锁定目标 | 锁定目标 | 没有锁定目标 | |
| HSD/FCR标志 |  |
 |
 |
|||||
小队(Flight)/团队(team)的PPLI是通过分析 J2.2 (空中PPLI)报文和交叉对照航迹编号和小队/团队PPLI来生成。 小队和团队的 STN 地址是通过加载DTC或使用UFC来设置而确定。 这些PPLI显示为青色,其内部显示的是成员编号(1-8)。 在HSD的缩放功能中,代表小队成员的(1-4,不包括自身的所属编号)的符号会放大到100%,以帮助区分开小队成员和其他的PPLI符号。
PPLI空中航迹限制
从其他网络成员处发送/接收PPLI数据必须满足以下条件:
- Flight/Package必须加入同个FC(战机频道)和NPG(网络参与组)
- F-16接收/发送PPLI的最大距离为250海里
- 系统航迹文件(STF)容器的最大容量为40个空中航迹
注意:如果满足相关要求,则SURV航迹将一直为最高优先级
Link 16 - 网络参与者组(NPG's)
FC信道和SC信道是专用网络参与者组(NPG)的一部分。每个信道和对应的编号(如:"042"为MC和FC的信道)定义了通道上可交换的数据。
例如,如果你创建了一个打击包(Package),在打击包内所有支持Link 16的飞机都将拥有相同的MC信道编号(因为此打击包都由单个预警机负责管制)。
进攻小队(穿越敌方领空的小队)与防御小队(不穿越敌方领空的小队)一样,始终有专门的 MC/FC 信道和NPG。

Link 16 - 团队(team)限制
Link 16网络只能在属于同一团队(BMS 中的1-7号)的成员之间建立。
如果你想确保盟友也能使用你所属国家势力的 Link 16 网络,则必须在任务指挥官中修改你的任务/战役。
打开 "Teams/Relations "选项卡,根据需要成为 Link 16 团队成员的国家设置 "Part at Team"(右侧示例:"US "是 Link 16 网络的组织者,因此需要修改ROK的 "Part of Team"为U.S.)。
J3.2 对空监视目标航迹
对空监视目标航迹是由监控单位和C2平台通过Link 16网络进行传输,以提高所有的入网者的态势感知能力。 这些航迹数据包包括位置、速度、航向、身份识别(如:友方、敌方、中立等)、类型和其他相关信息,以及对航迹质量(TQ)的评估。 F-16会接收,处理并保留监视态势信息的一个子集,同时考虑航迹类型、身份和与航迹相关的其他状态细节等因素。
监控航迹通常会每隔12秒更新一次。在间隔期间,航迹位置会由系统推测并保持最大20秒钟,以减少在连续的Link 16更新之间航迹位置的过度跳动。
如果20秒后仍然没有更新航迹信息,则会删除此空中监控航迹。
| 友好 | 中立 | 未知/疑似友军/延迟识别 | 可疑/疑似敌军/延迟识别 | 敌军 | |
|---|---|---|---|---|---|
| 关联的目标标识 |  |
 |
 |
 |

|

SURV空中航迹限制
必须满足以下条件才能从AWACS(C2)接收到对空目标航迹:
- AWACS必须已就位
- AWACS和Flight/Package必须连接到同个JDN网络(联合信息网络)->如果都在同个团队中那么BMS会自动完成此步骤
- 预警机的任务分配必须合理。其雷达可探测到 232 海里(430 公里)外的战斗机大小的目标,预警机的巡航高度足以消除地形遮蔽的影响。其MIDS的高功率发射端的通讯距离可达400海里。
- 如果目标没有正确回应IFF的Mode 4质询,则此空中目标航迹会被归类为未知(unknown)/敌对(hostile)
- F-16可以接收距其位置250海里以内目标的SURV轨迹。
- 系统航迹文件(STF)容器最多可容纳40个空中航迹。注意:如果满足对应要求,则SURV航迹优先级则一定会被提升
空对空航迹扩展数据(HSD) - 友军/PPLI
在空对空航迹中,显示的字段包括编号、强度和平台类型(由通用飞机类型表示)。 特定目标信息在 J3.2(空中航迹)信息中接收。以下是为 HSD 中显示的 PPLI 扩展航迹数据提供支持的各个数据字段:

呼号(Callsign)(HSD)
该字段由四个字母数字字符组成:两个字母字符后跟两个数字字符(从0到9),表示与航迹相关的语音呼号。 呼号通过 J2.2C2(空中 PPLI 任务信息续字)报文获得。该字段内的文本统一显示为白色。该字段的MIL STD允许在所有四个字符位使用字母和数字字符。
目标机型(Aircraft model)(HSD)
这是一个六位字母数字字段,向左对齐并填充空白,表示飞机平台类型(如 F16、F15 等)。 它显示具体的飞机型号或系列,如 F16A 或 F16C。如果没有收到具体的飞机类型信息,则显示通用类型。该字段内的文本显示为绿色。
高度(Altitude)(HSD)
该字段由三个用0填充的字符组成,格式为 nnK,其中"n"可以是0到9之间的任何数字,"K"是表示千英尺(feet)的固定字符。 它表示飞机高度四舍五入到最接近的千英尺。 高度数据从J2.2(空中PPLI初始字)报文和J2.0I(间接接口单位PPLI初始字)报文中获取。 该字段内的文本统一显示为白色。
航向(Heading)(HSD)
该字段由4个字符组成,当航向不满足4位数时,将自动在左侧填充0以满足此要求,此字段的数字格式为 nnn_,其中"n"代表0到9之间的任意数字(范围从000到359)。 它表示飞机的地面航向。 航向信息在 J2.2E0(空中 PPLI 扩展字)报文和J2.0E0(间接接口单位 PPLI 扩展字)报文中作为航向获取。 该字段内的文本统一显示为白色。
空速(Airspeed)(HSD)
3个字符、右对齐,代表飞机校准空速(单位:节)。 该空速在J2.2报文和J2.0报文中接收。 该字段中的文字始终为白色。
挂载(Stores)(HSD)
此为一个6字符字段,格式为Mx Sx/A-Jx,其中'x'可为0-9数字字符中的任意一个
- 'M'代表中距空对空导弹
- 'S'代表短距空对空导弹
- 'A'代表AGM系列空对地导弹(如AGM-65等。但不包括AGM-88/45/78>见'H')
- 'C'代表集束炸弹(CBU系列)
- 'G'代表通用炸弹(Mk-82/84/等)
- 'H'代表反辐射导弹(AGM-88/45/78/等)
- 'L'代表激光制导武器(GBU-12 等)
- 'J'代表惯性制导武器(JDAM、JSOW、JASSM)
战机信道(HSD)
一个3字符的数字字段,代表相关航迹(track)的Link 16战机对战机信道。战斗机信道号作为J2.2报文接收。该字段中的文字始终为白色。
航迹质量(HSD)
一个1字符的字母字段,代表 PPLI 航迹的位置质量。目前使用"H"字符表示高质量。
| PPLI/SURV偏离误差 | |
|---|---|
| L | <4.4海里 |
| M | <1.1海里 |
| H | <0.0281海里 |
任务信道(MISSION CHANNEL)(HSD)
一个3字符的数字字段,代表Link 16任务通道。该字段中的文本始终为白色。
油量(fuel)(HSD)
这是一个6字符的字段,格式为 xxxxx#,其中"x"代表0到9之间的任意数字。 它显示的数值最高可到99999磅。 该字段内的文本始终显示为白色。 燃料字段每180秒更新一次,取决于NDL。值得注意的是,F-16在PPLI传输中包含了燃料状态信息。
UHF频率(HSD)
显示J2.2 PPLI报文中接收到的UHF频率信息。该字段中的文本始终为白色。
源航迹编号(STN)(HSD)
STN由五位数字组成,每位数都为0-7组成的八进制数字,由网络管理员作为唯一编号分配给F-16,并由其定义NDL。该字段内的文本统一显示为白色。
机群PPLI
战机群(Aggregated flight)现在可以通过L16来发送他们的PPLI信息。此信息不会显示flight强度(飞机数量),而数据部分则与单个飞机的数据字段相同,但存在一个例外:Flight的呼号将以0结尾,用以指代此PPLI是一个Flight。航迹编号 (TN) 来自允许 PDLT 的Flight领队机。这样,如果机群的PPLI被PDLT,当它解除集群状态时,PDLT将以相同的TN继承到解除集群后的PPLI上。
空对空航迹扩展数据(HSD)-未知/敌对
在A-A航迹未知/敌对的情况下,系统会显示以下详细信息:航迹编号、飞机数量(强度)、飞机类型、交战规则数据、目标空速、杂项字段和航迹质量指示。 在J3.2(空中航迹)报文中会收到有关目标详细信息的特定报文。HSD中显示了以下参数:

源航迹编号(HSD)
航迹编号由一个5个字符的字母数字字段表示,格式为AANNN,其中"A"代表从A到Z(不包括I和O)的字符,或0到7的数字字符,"N"代表0到7的数字字符。 该字段对应于Link 16系统对相应目标的航迹编号。航迹编号通过J3.2I(空中航迹初始字)报文接收。该字段中的文本始终显示为白色。
强度(HSD)
强度由3字符、右对齐的字段表示,格式如下:
- "bbN"/"bNN"格式 - 表示最大可到12个单位的强度,其中'b'代表空格,'N'代表1-9的任意数字字符
- "2-7" - 表示强度在2至7个单位之间。
- "b>7" - 代表强度大于7个单位
- ">12" - 代表强度大于12个单位
强度数据通过J3.2I报文接收。
当接收强度未指定时,默认为"1"。该字段中的文字颜色与飞机类型由锁定此目标的飞机相关。
飞机类型(HSD)
该字段为6个字符,左对齐,字母数字表示飞机平台类型。 飞机符号类型(AST)在J3.2C1(Air Track Amplification Continuation Word)报文中接收。 该字段中的文字颜色与通过任务计划系统选择的 AST 相对应,可能与符号颜色不同。
| 战机 | FIGHTR |
| 战斗轰炸机 | FTBMR |
| 攻击机 | ATTACK |
| 轰炸机 | BOMBER |
| 侦察机 | RECON |
| 加油机 | TANKER |
| 运输机 | TRNSPT |
| 电子战机 | EW |
| 反潜机 | ASW |
| AWACS | AEW |
| ABCCC | J-STARS |
| 侦察直升机 | RECHEL |
| 攻击直升机 | ATKHEL |
| 运输直升机 | REHEL |
| 无人机 | UAV |
监视所属的交战规则(ROE)(HSD)
在显示飞机类型时,如果在ATDT ID树标准中选择了类型所属,则会出现一个"S"字符。 如果飞机类型是通过监视获得的,但ID树(ID-tree)标准中未选择类型所属,则该字符为空。 其颜色反映了与飞机类型相关的所属。
IFF Mode 4的交战规则(HSD)
该字段表示基于ATDT ID树标准的IFF Mode 4的状态:
- 如果选中了IFF Mode 4则显示“4”
- 如果标准未包括IFF Mode 4则会留白
“4”字符的颜色由以下规则决定:
- 白色代表目标航迹还未被IFF质询
- 红色代表目标已被IFF质询但是未收到或收到错误的应答
- 绿色代表IFF质询已被正确应答
Mode 4数据的传输由J3.2C1报文实现。
值得注意的是,机载F-16 AIFF应答与雷达航迹无关,因此不会影响该字段。
空速(HSD)
空速由3字符、右对齐的字段表示,以节为单位显示航迹的校正空速。 航迹速度数据通过J3.2E0(空中航迹扩展字)报文接收。该字段中的文本始终显示为白色。
航迹质量(HSD)
见 2.4.3.5.1.4.8航迹质量
J12.5报文关联与反向链路(J12.5 CORRELATION AND BACKLINK)
此报文以上行链路/反向链路的方式执行,战机使用J12.6目标分配报文(如下)对战机的目标进行反向链路上传(backlink)(对飞行员透明),C2单位(如预警机)对接收到的战机目标和监控轨迹进行关联处理(correlation),然后将相关数据从上行链路反馈给战机。注意:J12.5 反向链路尚未投入使用,会导致白色方格(战斗机目标)与 HSD 上的监视轨迹重叠(例如:方格与红色敌方三角形重叠)。飞行员可以通过在HSD的控制页面的第2页中选择“A TGTS”来消除这种情况。
J12.6报文 目标分配(战机空中目标航迹)
战斗机通过战斗机对战斗机(F-F)网络接收 J12.6 报文。MIDS通过F-F网络来传输J12.6报文,报文会提供被锁定目标的位置、速度、航向和状态。MIDS仅提供从Flight/机组成员或志愿者处收到的战机航迹。如果13秒内没有收到更新,则会清除此航迹。
目标的颜色和形状用于识别航迹:友军(绿色圆圈)、中立(白色圆圈)、未知和待定和假定友军(白色正方形)、疑似敌军(黄色正方形)、敌军(红色三角形)。空心的虚线符号用于表示监视轨迹(SURV-Track),实心的完整符号表示由本机传感器所探测到的轨迹,这些轨迹与LIN-16的监视轨迹或飞行成员/志愿者轨迹相关联。符号下方显示海拔高度,固定速度矢量线表示航迹的移动方向(如果有的话)。符号以 FCR 和 HSD 格式显示。
| 显示格式 | Flight成员(1-4)锁定(BUGGED)目标时 | 团队(TEAM)成员(5-8)锁定目标时 | 多Flight成员锁定目标时 | 志愿者锁定目标时 | 目标与未知监视单位相关联时 |
|---|---|---|---|---|---|
| HSD上(未知目标) |  |
 |
 |
|
|
| FCR上(未知目标) |  |
 |
 |
 |

|
僚机的锁定线(LockLines和射击线(ShotLines)
僚机(flight成员1-4)的关注目标 (Target Of interest, TOI) 的锁定线仅显示在HSD上(不会显示在FCR上)。锁定线显示为虚线青色线,只要Flight成员或其目标在本机HSD的FOV内,就会显示该线。如果Flight成员或目标在HSD的FOV外,则不会显示锁定线。如果在HSD的防拥设置中设置了不显示Flight成员,则锁定线也会同样不会显示。若导弹导弹已经发射,则青色的锁定线将变为射击线,并开始闪烁。如果战机在发射AIM-120后移动了TOI到了新的目标上,则HSD上会同时显示射击线和锁定线。当在战机发射了第一枚AIM-120后移动TOI并发射了第二枚AIM-120,若还未到达第一枚的预定撞击时间(time-to-impact)或预定中止时间(time-until-termination)又再次转移TOI到新的目标,则此时HSD上将会同时出现两条射击线和一条锁定线。要注意的一点是:本机的锁定线/射击线不会在自己的HSD上出现。在现在的版本中暂时只支持每个飞机只显示一条锁定线/射击线

Link 16 报文(FCR)
不同的L16报文用于战术指挥、控制和通信之间的信息交换。
空对空航迹扩展数据(FCR) - 友军/PPLI
在A-A航迹中,显示的字段包括编号、强度和平台类型(由通用飞机类型表示)。 特定目标信息在J3.2(空中航迹)信息中接收。 以下是为FCR中显示的PPLI扩展航迹数据提供支持的各个数据字段:

呼号(FCR)
该字段由四个字母数字字符组成:两个字母字符后跟两个数字字符(从0到9),表示与航迹相关的语音呼号。 呼号通过J2.2C2(Air PPLI mission information continuation word)报文获得。 该字段内的文本统一显示为白色。该字段的MIL STD允许在所有四个位置使用字母数字字符。
飞机平台类型(FCR)
这是一个六位字母/数字字段,向左对齐并填充空白,表示飞机平台类型(如F16、F15等)。 它显示具体的飞机型号或系列,如F16A或F16C。如果没有收到具体的飞机类型,则显示通用类型。 该字段内的文本显示为绿色。
高度(FCR)
该字段由三个用零填充的字符组成,格式为nnK,其中"n"可以是0到9之间的任意数字,"K"是表示千英尺(ft)的固定字符。 它表示飞机高度四舍五入到最接近的千英尺。 高度数据从J2.2(空中PPLI初始字)报文和J2.0I(间接接口单位PPLI初始字)报文中获取。 该字段内的文本统一显示为白色。
航向(FCR)
该字段由4个字符组成,其中4个字符用0填空,格式为nnn_,其中"n"代表0到9之间的任意数字(范围从000到359)。 它表示飞机的地面磁道。 航向信息在J2.2E0(空中PPLI扩展字)报文和J2.0E0(间接接口单位PPLI扩展字)报文中作为航向获取。 该字段内的文本统一显示为白色。
空速(FCR)
3字符、右对齐的字段,代表飞机校正空速(单位:节)。 该空速在J2.2报文和J2.0报文中接收。该字段中的文字始终为白色。
挂载(FCR)
此为一个6字符字段,格式为Mx Sx/A-Jx,其中'x'可为0-9数字字符中的任意一个
- 'M' 代表中距空对空导弹
- 'S' 代表短距空对空导弹
- 'A' 代表AGM系列空对地导弹 (如AGM-65等。但不包括AGM-88/45/78>见'H')
- 'C' 代表集束炸弹(CBU系列)
- 'G' 代表通用炸弹(Mk-82/84/等)
- 'H' 代表反辐射导弹(AGM-88/45/78/等)
- 'L' 代表激光制导武器(GBU-12 等)
- 'J' 代表惯性制导武器(JDAM、JSOW、JASSM)
战机信道(FCR)
3字符的数字字段,代表相关航迹的Link 16(战机-战机)信道。 战斗机信道号作为J2.2报文接收。该字段中的文字始终为白色。
航迹质量(FCR)
单个字母字符的字段,代表PPLI航迹的位置质量。目前使用 "H "表示高质量。
空对空航迹扩展数据(FCR) - 未知/敌对
在A-A航迹未知/敌对的情况下,系统会显示以下详细信息:航迹编号、飞机数量(强度)、飞机类型、交战规则数据、目标空速、杂项字段和航迹质量指示。 在J3.2(空中航迹)报文中会收到有关目标详细信息的特定报文。 FCR中显示了以下参数:

源航迹编号(FCR)
航迹编号由一个 5 个字符的字母数字字段表示,格式为AANNN,其中"A"代表从A到Z(不包括I和O)的字符,或0到7的数字字符,"N"代表0到7的数字字符。 该字段对应于Link 16系统对相应目标的航迹编号。 航迹编号通过J3.2I(空中航迹初始字)报文接收。 该字段中的文本始终显示为白色。
强度(FCR)
强度用3字符、右对齐的字段表示,格式如下:
- "bbN"/"bNN"格式 - 表示最大可到12个单位的强度,其中'b'代表空格,'N'代表1-9的任意数字字符
- "2-7" - 表示强度在 2 至 7 个单位之间。
- "b>7" - 代表强度大于7个单位
- ">12" - 代表强度大于12个单位
强度数据通过J3.2I报文接收。
当接收强度未指定时,默认为 "1"。该字段中的文字颜色与飞机类型相关所属主权相对应。
飞机平台类型(FCR)
该字段为6个字符,左对齐,字母数字表示飞机平台类型。 飞机符号类型(AST)在J3.2C1(Air Track Amplification Continuation Word)报文中接收。 该字段中的文字颜色与通过任务计划系统选择的 AST 相对应,可能与符号颜色不同。
| 战机 | FIGHTR |
| 战斗轰炸机 | FTBMR |
| 攻击机 | ATTACK |
| 轰炸机 | BOMBER |
| 侦察机 | RECON |
| 加油机 | TANKER |
| 运输机 | TRNSPT |
| 电子战机 | EW |
| 反潜机 | ASW |
| AWACS | AEW |
| ABCCC | J-STARS |
| 侦察直升机 | RECHEL |
| 攻击直升机 | ATKHEL |
| 运输直升机 | REHEL |
| 无人机 | UAV |
请注意,在FCR中,如果AWACS识别出飞机,则可提供飞机类型的详细信息(例如:"MG29" = Mig29)。而在HSD中则不显示这些详细信息,只提供飞机平台的数据。
监视归属的交战规则(ROE)(FCR)
在显示飞机类型时,如果在ATDT ID树标准中选择了类型归属,则会出现一个"S"字符。 如果飞机类型是通过监视获得的,但ID树标准中未选择类型归属,则该字符为空。 其颜色反映了与飞机类型相关的归属。
IFF Mode 4 的交战规则(ROE)(FCR)
该字段表示基于ATDT ID树标准的IFF Mode 4的状态:
- 如果选中了IFF Mode 4则显示“4”
- 如果标准未包括IFF Mode 4则会留白
“4”字符的颜色由以下规则决定:
- 白色代表目标航迹还未被IFF质询
- 红色代表目标已被IFF质询但是未收到或收到错误的应答
- 绿色代表IFF质询已被正确应答
Mode 4数据的传输由J3.2C1报文实现。
值得注意的是,机载F-16 AIFF应答与雷达航迹无关,因此不会影响该字段。
空速(FCR)
空速由一个3个字符、右对齐的字段表示,以节为单位显示轨道的校准空速。 轨道速度数据通过J3.2E0(空中轨道扩展字)报文接收。 该字段中的文本始终显示为白色。
航迹质量(FCR)
见 2.4.3.5.1.4.8 航迹质量。
Link-16的控制与额外功能
手不离杆防拥设置(FCR)
在FCR页面中,位于OSB 16旁的标签代表手不离杆防拥设置的状态,此标签的左侧便是AIFF询问器模式指示(如果装备了)。此设置可用的模式为:ALL、FTR+、TGTS和NONE。可以使用TQS上的COMM OUT和COMM IN按钮来切换模式
其中,短按COMM OUT(少于0.5秒)为设置到NONE模式。短按COMM IN(少于0.5秒)为在ALL、FTR+和TGTS模式间循环切换。使用COMM OUT来设置HUD/HMCS上的防拥,并在 FCR 上设置为NONE模式(与 SOI 无关)。
| 显示级别 | FCR显示级别 | ||||
|---|---|---|---|---|---|
| 战机航迹 | PPLIs | IDM 航迹 |
监视航迹 | FCR-L16 已关联的航迹 | |
| ALL | X | X | X | X | X |
| FTR+ | X | X | X | X | |
| TGTS | X | ||||
| NONE | X | ||||
HSD缩放(HSD)
为了增强 L16 的功能并提高态势感知能力,HSD缩放功能允许临时调整HSD显示范围,以帮助了解僚机位置。 此功能与SOI无关,在你按住EXP/FOV按钮时(pinky switch),HSD将会将缩放到能显示所有团队成员(team members 1-4)的最小范围(并以居中模式),并将团队符号放大到比正常尺寸大33%的大小。根据缩放的倍率,HSD 符号、线条等元素也会重新在HSD上绘制。当启用临时缩放时,OSB 3下方会闪烁“ZOOM”标签,OSB 11-15和HSD范围之外的所有其他标签都会空白。若HSD为SOI,则仍可在启用临时缩放的同时,通过将HSD上的光标移至PPLI上来访问扩展数据。另外,如果僚机离开了HSD的FOV的显示范围,或者接收到的新僚机的PPLI位置报文超出了HSD的初始缩放范围FOV,此时临时缩放范围也不会改变。想要显示所有僚机在HSD上只能重新按下临时缩放键。在释放EXP/FOV按钮后,HSD将返回到之前选择的格式和范围。
HSD防拥(HSD)
在配备了经过MMC升级后的L16飞机中,增加了额外的 HSD 控制 (CTRL) 页面 2(OSB 10),以自定义 HSD 上的 Link 16 和 IDM 符号的防拥选项。更多信息请参见第 2.1.6.18.8 节 HSD 控制页 (CNTL)。
Link-16/IDM传输(XMT L16/XMT IDM)


OSB 6可调节当前 SPI 或航路点的传输方法。OSB 6 支持经由IDM和 L16进行空对地SPI传输,你可在IDM和L16之间切换。默认选择为XMT IDM。
目前的BMS里,XMT L16选项的作用与XMT IDM选项没有区别。
Link 16 HUD/HMCS 显示选项
HUD上的Link16图标

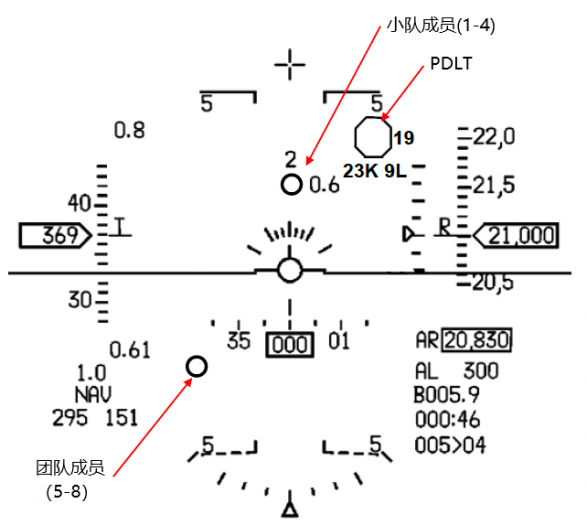
Link 16 小队成员图标
为了提高态势感知(SA),当小队成员(编号2-4)在视野内且满足Link 16的有效高度时,HUD/HMCS 会用符号标出最多三名小队成员(编号 2-4)位置。 这些符号在各种模式下均可见,包括A-A、A-G、DGFT、NAV 和 MSL OVRD。
每个小队成员都在一个15 mR的圆圈内,符号上方标有对应的小队成员编号(1-4)。圆圈旁边标注了距离,采用与PDLT距离相同的格式。
HUD/HMCS视野之外的小队成员不会触发任何符号提示。这些符号在所有主模式下均保持可见。

友军显示

在所有主模式下,HUD/HMCS现在会显示代表Link 16第5-8号成员的符号。 这些团队成员通过四个10 mR圆圈显示,在Link 16接收到有效高度时可见。 这些圆圈独立存在,没有任何附加窗口、符号或附带文字。 团队队员离开HMCS视场时,不会有任何提示。
此外,如果激活了HUD 消隐(blanking)功能,当飞行员将注意力转向 HUD 时,HMCS 上第5-8号队员的标识将会暂时消失。
请注意,HUD/HMCS不会显示志愿者(donor)的STN。
僚机的兴趣目标(TOI)
当主模式为 A-A、NAV、MSL OVRD 或 DGFT 时,HUD/HMCS(在 FOV 范围内)最多可同时显示三个Flight成员的TOI。Flight成员的TOI由一个15 mR的方框组成,符号上方是Flight的成员编号(1-4),右侧是距离值。如果一名Flight成员对目标发射了导弹,则Flight成员的编号将会闪烁。如果多个Flight、团队(team)或志愿者(donor)成员锁定了同一目标,且产生的J12.6报文已进行关联,则目标框将会显示“M”字符来代替Flight成员的编号。如果任何一名成员向目标发射导弹,此时“M ”将闪烁。

HUD/HMCS防拥PPIS

为提高安全性,可在着陆时对HUD/HMCS上的Link-16符号进行防拥设置。在放下起落架并切换主模式到导航模式(NAV Mode)后,飞行员可以短按COMM-outboard(小于5秒)来清除掉HUD和HMCS上除PDLT以外的所有Link-16符号
主数据链航迹(PDLT)
主数据链航迹(PDLT)是指飞行员特别关注的Link 16航迹,如空中目标航迹或PPLI。 为了加以区分,在Link 16航迹周围会有一个八边形符号,并辅以相关符号的颜色。 这个八角形符号在A-A FCR、HSD、HUD和HMCS等各种显示设备/页面中都能看到。
HUD/HMCS在显示PDLT符号的同时显示斜距和数字方位角(AA)。
方位角位于八角形符号下方,紧挨PDLT高度。
方位角以十度为单位,后面的"L"表示左方位角,"R"表示右方位角。
高度/方位角 窗口的格式为"ddd#dddd",高度最多可显示两位字符(单位为千英尺),后跟字母"K",后接空格,方位角由两位字符组成,用"L"或"R"表示左/右。
HUD和HMCS均使用小字体字符。
距离以Nm(海里)为单位。

指定一个PDLT

要创建PDLT,你需要将HSD页面设为SOI,将 HSD 光标置于非TOI相关的Link 16的空中数据链路航迹,或Link 16雷达航迹上,然后按下TMS 前(TMS forward)按钮将其指定为PDLT。
若要将Link 16空中航迹标记为PDLT,则会在其符号周围显示一个八角形符号。
当HSD光标位于HSD上不同的DL目标上时,按下TMS 前(TMS forward)按钮,八角形就会移动到新指定的PDLT上。
请注意,只能将友军/团队(team)/志愿者(donor)飞机指定为 PDLT。
PDLT步进选择

当HSD为SOI且HSD上存在 PDLT 时,你可以按下TMS 右(TMS right)在HSD上循环浏览数据链和雷达相关航迹。 PDLT 在步进序列中会移动到下一个数据链目标,绕过雷达TOI,进入下一个数据链轨迹。 该序列遵循从下到上、从右到左的模式。
请注意,只能将友军/团队(team)/志愿者(donor)飞机指定为 PDLT。
移除PDLT
当HSD为SOI且存在PDLT时,按下TMS 后(TMS aft)可以移除PDLT八边形图标, 除非HSD光标位于预计划威胁(PPT)上方,且其威胁环可见。 在这种情况下,第一次按下TMS 后(TMS aft)先会移除威胁环,再次按下TMS 后(TMS aft)才能移除 PDLT。 要使用TMS 后(TMS aft)移除 PDLT,光标不一定要直接位于 PDLT 上方,但一定不能位于激活的威胁环的预计划威胁(PPT)上方。
HUD数据链目标定位线(TLL)(PDLT)
如果出现了PDLT,并且落在HUD视野之外,HUD上就会出现一条DL目标定位线 (TLL)。 该TLL由一条长度为40毫弧度的虚线表示,从十字向外投影,朝向PDLT的方向。
- 雷达 - 实线
- 目标吊舱 - 点线
- 数据链 - 虚线

只要指定的PDLT位于HUD视野之外,数据链TLL就会在HUD上显示。
如果PDLT转移到HUD视野之外的另一个数据链航迹上,则TLL会相应的发生变化,以指示新的PDLT方向。
但是,如果新的PDLT位于HUD的视野范围内,则 PDLT 八边形会出现在HUD上。
当PDLT进入HUD视野时,PDLT八边形将取代数据链TLL。
当不再指定PDLT时,数据链TLL将消失。
HUD数据链目标定位角(TLA)
当出现PDLT且HUD上显示数据链TLL时,还会显示目标定位角(TLA)。 数据链TLA表示偏离视轴的角度,其位置与沿数据链TLL视轴(LOS)中心的十字准星相距57个弧度。 这57毫弧度的距离可确保数据链TLA不会遮挡FCR TLL或TGP TLL末端的箭头。 由于数据链TLA窗口与TGP TLA窗口和FCR TLA的视轴十字距离相同,如果数据链TLA窗口开始与TGP TLA或FCR TLA重叠,数据链TLA将被隐藏,以防止与其他TLA重叠。 尽管如此,即使数据链TLA被隐藏,数据链TLL仍然可见。在所有TLA中,数据链TLA的优先级最低。
使用 PDLT 的实用方法
因为PDLT是独立于雷达来运行的关系,因此在空对空环境中,你可以在不辐射雷达电磁信号的情况下就能获得对态势感知的增强(对方飞机上的RWR上不会出现你辐射的信号),如果你还知道对方没有数据链也没有早期预警系统的话,你便有更大的机会去深入敌后或成功扫荡一片区域
另一种方法是将 PDLT 作为一种工具来增强你的态势感知,例如在 BVR 交战中。在下面的示例中,你可以看到一架米格-29 正在交战(TOI)。TOI右侧的另一个回波已被标记为 PDLT,以指示你它可作为可能的下一个目标。如果你被目标锁定导致无法集中精力监视其他飞机,PDLT 便能帮助你重新快速建立态势感知。
