8 低空导航
阅读
2024-03-24更新
最新编辑:布莱克霍克
阅读:
更新日期:2024-03-24
最新编辑:布莱克霍克
任务位置:群山机场停机坪
状态:ROKAF F-16 block 52 – 双机 - 呼号 Sherpa 2.
总重: 39424 lbs. 4 GBU-12 & 双 LANTIRN 吊舱. 最大G值: 5.5/-2.0 最大速度: 550 kts / 0.95 Mach.
天气:此训练 TE 使用地图天气图 (Fmap)。 用户现在可以根据 GRIB 数据创建真实的天气模式(有关更多信息,请参阅BMS-Manual and Technical手册)。
以下的图片是本次训练中的气象信息。左上角的图片反映了每个特定地区的状态:“绿色:优良;黄色:差;红色:恶劣”。
右上角的图片为每个地理区块的风向及其风速信息。左下角为QNH信息。右下角为温度信息。

请观察此图,我们可以发现风来自北边,因此我们准备从RWY-36起飞离场,同样我们也可以从图片中得知:在航路点 3 - 4到航路点 8 - 9这段路程中气象条件优良,我们此时可以在KTOAR 进行目标打击练习(这段不是本次TE的训练内容)
任务目标:夜间恶劣天气的情况下低空( 500 ft )导航到任务区域(KTOAR,导航点14 )
本次任务将会演示如何使用LANTIRN(低空导航和目标红外夜间定位系统吊舱英语:Low Altitude Navigation and Targeting Infrared for Night)。LANTIRN包括两套吊舱,AN/AAQ-13 导航吊舱挂载于机腹左侧的挂点,AN/AAQ-14位于机腹右侧的挂点。
BMS1F-16CM-1 和 BMS1-F16CM-34-1-1 手册中都记录了 LANTIRN 套件的操作使用,在尝试执行此任务前应阅读这两本手册。
训练任务将从停机坪开始,因为在起飞后不久就需要使用 TFR 系统,所以请在地面检查好 TFR 和 FLIR 以备使用。我们将演示所有的检查项目,并根据天气情况低空飞行至目标区域。最后,本次训练将在 IP 点停止,之后的轰炸部分与本次训练任务无关。不过,你也可以选择继续飞行,并对 KOTAR 的目标进行 LGB 打击练习。如果需要练习,在进入飞机之前,不要忘记在 LOADOUT 屏幕上记下炸弹代码。(1688)
在夜间你可能难以在昏暗的驾驶舱中看清每个开关的位置。为了完成冷启,你可以先使用NVG(夜视仪)接通飞机电源,然后打开驾驶舱聚光灯(工具灯):将MAIN PWR电门调到 BATT 位并启用座舱灯(默认按键:SHIFT + S)。请注意,座舱聚光灯并不兼容NVG(夜视仪),同时打开将会使得过亮导致而看不清座舱,所以请在启用舱内聚光灯后关闭夜视仪。
挂载吊舱电源默认处于关闭状态,所以第一步你需要先打开位于 SNSR PWR 面板的 LEFT HDPT 和 RIGHT HDPT 开关, 这一步通常会在接通FCR电源时一同完成。
现在请立即将MFD切换到FLIR页面,并将FLIR设置到STBY(OSB 18)。NOT TIME OUT 将会在系统预热时显示,约 7 - 15 分钟。这是一段很长的时间,由于你可能需要在之后对红外热像仪进行校正,因此应在停机坪冷启程序中尽早执行这些程序。
同样的,将MFD转到TFR页面,TFR页面同样设置到STBY;NOT TIME OUT 也会同样出现。TFR系统需要3分钟准备时间,NOT TIME OUT 将会在TFR准备完成时消失。

MISC 面板上的 RF(射频) 开关位置将决定 TFR 可用的操作模式(参见 BMS1-F16CM-34-1-1)。在RF开关设置为SILENT(静默)时 TFR 将会待机不可用,而在设置为 QUIET 下 TFR 只能使用 WX (Weather)[天气] 和 LPI (Low Probability of Intercept)[低被探测率] 模式。为了检查 TFR 系统,请保证 RF 开关被设置到 NORM,这样TFR才能使用所有的工作模式(NORM,WX,LPI和VLC)。
我们同时需要保证雷达高度(RALT)表也在正常工作。我们我们现在先将雷达高度开关设置到STBY,待进入跑道时再将其打开。若雷达高度表未启用,FLCS 警告灯将会出现,在PFL面板中 FLCS FLUP OFF 信息将会出现,MFD的TEST页面也会出现 FLCS 054。在RALT没有设置为ENABLE(启用)前,你可以按下FLCS Reset来清除这些告警。
Manual TF Fly-up 开关的 "ENABLE"(启用)位置可确保 MAN TF(手动地形跟踪)与 AUTO TFR(自动地形跟踪) 一样具有自动跃升(fly-up)保护功能。如果开关处于 "disable "位置,则飞行员必须手动执行跃升机动。


当 TFR 准备完成时,NOT TIME OUT 将会消失,飞行路径参考线将会出现。我们可以根据个人需要在第一次飞行前进行TFR检查:
- 设置 SCP (Set Clearance Plane)[地形跟踪高度] 为1000ft (OSB 6) (右图的MFD示例中右侧高亮的1000)
- 设置 RIDE (避障幅度)类型到 HARD (强)(OSB 2)
- 在DED的 A-LOW 中将 CARA ALOW 设置到 900ft 【即SCP -10%】 /2024年03月24日修改/
- 飞行员可以设置 TFR ADV 线参数,在高度高于此线时AAF(高度咨询功能)将会被禁用。
虽然现在雷达高度表(RALT)还处于STBY(待机)状态,但TFR功能已经在地面测试完毕。FLIR功能仍然处于准备状态且可能还需要10分钟左右,我们将在EOR区域(End of Runway)完成剩下的测试。继续完成剩下的冷启程序并滑行到预定的跑道。
当FILR也可用时,点击MFD上的 OPER(OBS 20) 并调整UFC上的 ICP BRT 旋钮来将FLIR图像叠加在HUD上,你可以使用 ICP 上 FLIR 区域的上下箭头调整图像亮度增益。
HUD 上的 FLIR 图像应与 HUD 图像正确对齐。但如果出现对准不准的情况,你也可以在 HUD 上调整前视红外图像位置。我们将在升空后立即执行此校准。(不推荐在地面进行FLIR图像对齐,因为吊舱位于机腹而HUD位于座舱,此高低差意味着在地面时近距离物体的FLIR图像与你在HUD看到的近距离物体永远没有重合可能)
在地面操作中,你不需要在 HUD 中显示 FLIR,因此请将 FLIR 置于待机状态。吊舱已经过地面检查,让我们看看它们在飞行中的表现如何。
夜间在 RWY36 起飞是观察新的降落灯效果的好机会。请确保在起飞前将鼻轮灯切换到 LANDING。起飞开始建立爬升姿态后,转 180°朝向 STPT # 2 ,一旦建立了正确的航向,地平线上会出现一些有用的山脉,供前视红外对准。
保持平飞,放大你的视角,启用你的FLIR功能并按下MFD上的BSGT (OSB 10)。此时BSGT注记符将会高亮,你可以使用光标控制杆(Cursor)来将FLIR图像对准HUD实际看到的物体。完成后请再次按下 BSGT (OSB 10) 退出FLIR校准模式,然后再次点击 STBY 重新让FLIR待机
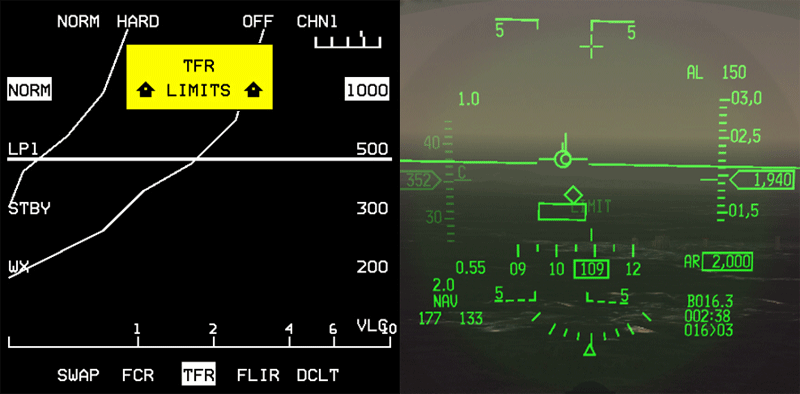
例如,在下面的的截图中,左侧是MFD上显示的 FLIR 图像,右侧对应的是 HUD 上叠加的 FLIR 图像。你可以发现 HUD 下部较暗的山脉和叠加的图像(红色线段)并不重叠,正如你所见,FLIR 图像过高(故意为之)。

若出现这种情况,你可以使用雷达光标(Radar Cursor)按钮将HUD图像下移。
毋庸置疑,为了飞行安全,在飞行时一定要校准好FLIR。
在使用TFR功能前,我们一定要先保证系统的可靠性。我们可以通过一系列约耗时2分钟的检查来完成此项,在 STPT 2 到 STPT 3 这段路程我们是用于进行 LAN (Low Altitude Navigation) [低空导航] 检查。 我们将会测试手动地形跟踪(MAN TF),自动地形跟踪(AUTO TF),跃升(FLYUPS)和雷达高度(RALT)功能。
一旦你确定了TFR已经可以安全使用时,我们将按照任务要求设置地形跟踪参数并从低空进入目标区域。【注:飞行空中是请务必打开雷达高度计电源和雷达高度计】
速度限制检查
- 加速到 350KTS 并爬升到 1000ft AGL 以上。我们将测试 TFR LIMITS (地形跟踪限制)告警是否能正确工作。
- 选择MFD的TFR页面,并将TFR设置为NORM。此时我们将以低于360KTS的速度飞行,测试时将会出现以下提示:
- HUD: LIMIT 出现,空速刻度在闪烁 —— 同时MAN TF框也将出现
- MFD: 一个黄色框显示的 TFR LIMITS 将会出现
- 加速到 400KTS ,LIMITS标识将会在速度超过 360KTS 时消失
- 进行大于60°坡度的转弯(也称作转向限制测试)并确认:
- MFD:黄色的 TFR LIMITS 框闪烁
- HUD: LIMIT 出现,MAN TF框在转向持续2秒以上时消失。
- 空速刻度不会闪烁,因为这次的限制因素不是空速,而是倾角。
- 改平,检查所有 LIMITS 提示是否消失,MAN TF 框是否重新出现

跃升检查(Fly-Up Check)
现在,我们将在 MAN TF 中测试更为激进的 3G 和 4G 跃升,方法是诱导规避障碍程序:
- 在手动地形跟踪(MAN TF)模式下且跟踪高度(SCP)为 1000ft 时向前压杆将离地高度降到约 500ft
- 确定此时 G-LIMIT (过载限制)和 OBSTACLE (障碍)告警将会出现
- PULL-UP将会出现在HUD上
- 一个大的闪烁的X也将出现在MFD上
- 机载语音系统将会持续播报“PULL-UP,PULL-UP”
- 将ALOW设置到跟踪高度(SCP)的 -10%
下高检查 (TFR Letdown check)

如果可能,请在低地上进行以下检查。我们将检查 TFR 在自动模式下的行为,并将其推至极限,以检查自动 2G 跃升:
- 启用AUTO TF,ADV MODE开关位于中心面板左边的MISC面板上。按下后,ADV MODE按钮上将会显示绿色ACTIVE提示你已开启自动地形跟踪,此时飞机将会自动缓慢的调整高度到设定的地形跟踪高度(SCP)(上文设置的高度为1000ft)
- 确定HUD上出现了 AUTO TF LINE(自动跟踪线段)
- 确定HUD上出现了 NO TER 提示且TFR的MFD界面也出现了地形回波
- 监视飞机在离地1000英尺处开始改平
- 向前推杆调整飞机俯仰为 -2.5°来进行浅俯冲
- 确定在高度位于A-LOW(本例中为900英尺)时听见了“ALTITUDE – ALTITUDE”的通报
- 确定LO TF显示在HUD上,两个MFD中都显示LIMIT警告且听到了“PULLUP – PULLUP”语音告警
- 在飞机在离地高度1000英尺时按住摇杆上的paddle switch【键位Key为:SimAPOverride】来暂时取消跃升(fly-up)功能,此时STBY灯将会在ADV MODE按钮上出现。
- 再次按下ADV MODE按钮直到按钮上的两个提示灯都熄灭并松开paddle switch键
- 你现在又恢复到了手动地形跟踪模式下,检查手动地形跟踪框(MAN TF box)是否在HUD上重新出现。

飞跃(fly-up)为飞控系统(FLCS)自动执行的机动指令,用于避免地形碰撞。此功能在AUTO TF(自动地形跟踪)可用(在MAN TF(手动地形跟踪)下只有在位于FLCS面板上的MANUAL TF FLYUP开关设置为ENABLE时才可用)
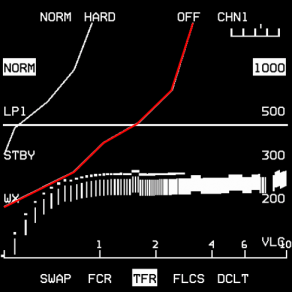
正常的飞跃(fly-up)功能会在高度低于设置的地形跟踪高度(SCP)的75%时起效,其拉起过载为 2G。在 TFR MFD 页面上你可以看到该曲线。如截图所示,这对应第二条路径。
若是需要执行超过2G过载来规避障碍的话,TFR页面将会显示G-LIMIT并执行3 G过载的跃升机动。
若是需要超过3G过载的机动,TFR页面将会显示OBSTACLE警告并执行超过4G的跃升机动。这两个情况下两个MFD上都会显示一个大X。
还有一点需要了解的是,跃升(fly-up)指令并不会拉平你的飞机。跃升指令会在速度为300节或是俯仰角度到达45°时停止以防止潜在的失速。飞行员应在此之前接管飞机操作以防止飞机姿态失控。
飞行员也可以在跃升(fly-up)生效时按下paddle switch提前停止指令。但我们推荐在停止指令后继续手动的爬升到安全高度,在按下paddle switch后ADV MODE按钮上的绿色ACTIVE会消失,取而代之的是琥珀色的STBY,这代表飞行员已接管指令。
TFR 系统整体完整性管理检查(TFR SWIM Check)
- 还有最后一项检查。我们需要确保在雷达高度计因任何原因失灵时,自动滚转至机翼水平并跃升:
- 进行 15 - 30°的滚转。
- 选择MFD上的TEST页面,点击RALT BIT(OSB 7)
- 确认以下要素:
- MAN TF(手动地形跟踪)框消失
- 飞机自动滚转至机翼水平并开始跃升
- 听到"PULL-UP"告警
- WARN(告警)出现在HUD上且TF FAIL(地形跟踪失效)告警灯亮(左眩光防护罩)
- TF FAIL PFL(地形跟踪失效)出现在PFLD(若低于4500英尺 AGL)
- 按住 paddle switch 并在SCP高度时平飞。当RALT BIT完成时松开 paddle switch 来继续执行MAN TF(手动地形跟踪)
- 按下F-ACK来确认SWIM PFL信息。此时MASTER CAUTION(主告警)和TF FAIL(地形跟踪失效)告警灯会消失
在所有的TFR系统检测完成后我们已经确定现在的TFR系统非常可靠,我们我们可以继续执行后面的任务。
我们将地形跟踪高度(SCP)设置为500英尺。A-LOW重新设置为比现在的SCP小10%:即450英尺。避障幅度(RIDE)继续设置为HARD并让TFR系统工作在MAN TF(手动跟踪)模式。若是打算使用自动地形跟踪来进入目标区域,你可以点击 ADV MODE 按钮切换工作模式。
请记住自动地形跟踪只会让航电接管俯仰,而滚转(除非设置为混合模式)和空速仍然由飞行员负责
现在天色慢慢暗了下来,现在请打开MFD的FLIR页面,按下OPER对应的OSB按键让FLIR图像投影到HUD上,现在请向航路点4飞行。你在进行 TFR 检查期间可能已经注意到,天气已经恶化。 刚才群山地区的天气还非常好,但现在天气情况非常恶劣,当你飞往航路点 4 时,你将进入恶劣天气地区。

下雨对 TFR 来说是一个问题,因为它会降低雷达工作条件,你可能会在遇到降雨之前就已经处于飞行状态。 使用 TFR 时,提示你正在下雨的第一个现象便是 TFR 页面中出现的分散的雷达回波,如右侧屏幕截图所示。 每当你遇到恶劣天气时,您都应该将 TFR 切换到 WX(天气)模式,方法是按 TFR 页面上的 OSB 16 或直接按下 UFC 上的 WX 按钮。
如果你不使用 WX 模式,TFR 系统会不断尝试拉起以避开雨滴。 一旦进入 WX 模式,TFR 的雷达回波将再次以流体曲线的显示回波,飞机也会恢复正常姿态。
在我们结束本次培训课程之前,有两件关于 FLIR 操作的小事情需要介绍:LOOK-INTO-TURN (LIT) 和 SNAPLOOK。
你可以通过按住 DMS Up 并移动光标来选择 SNAPLOOK模式。 你可以让视角围绕 FLIR 视轴上下移动 9°范围。 同时可以让视角左右移动约25°。 这可用于在转向之前检查飞机左侧或右侧的地形。 当你放开 DMS UP 按钮时,FLIR 将恢复默认视角。

如果坡度角度超过 5°,并且按住 DMS Up 时,则将启用 LIT 指令。 FLIR LOS 将沿转弯方向移动 FLIR 图像。 释放 DMS 时,FLIR 将恢复视角。
每当 HUD 上的 FLIR 图像发生偏移时,FPM (运动向量符)就会变为虚线,表明图像发生了偏移。(如右图)
在前往航路点 5 的途中,你将在恶劣天气下于夜间低空飞行。 虽然没有人愿意在这种情况下独自飞行,但是现在你正在这么做且敌方的地对空系统也不会知道你正在这么做。
在 AUTO TF 模式下飞行时,只要你确保在 TFR 系统工作限制内(360 至 600 节 - 最大倾角 60°),你就可以放心让 TFR 管理你的高度(对应SCP(地形跟踪高度)设置)。 每当发生跃升时,请让 TFR 系统自动爬升到安全高度,再使用摇杆上的Paddle按钮来终止跃升程序,确认 ADV MODES 的"STBY"琥珀色灯被点亮并改平飞机。 一旦恢复TFR工作所需参数,请松开Peddle switch按钮,恢复TFR系统到AUTO TF(自动地形跟踪)模式。

当进行钻山飞行时,TFR 系统还将在HUD中指示高于SCP高度的地形方向。(如右图所示)
如果你不超控跃升(fly-up) 指令的话,指令将以 45° 的俯仰角姿态终止跃升(或者你减速至 300 节时)。
此时TF系统将会失效并将俯仰控制权交回飞行员。 如果你不采取适当的控制,你可能会陷入姿态失控之中。

如果你是打算低空飞行以避免被探测到的话,请不要让飞机以 45°爬升。 请待在低空并维持高速,一旦进入安全空域时便可爬升高度。 你现在可以维持低空飞行至航路点14或更远。
DASH - 34第2.10章包含了TFR和FLIR的更多内容。由于在大多数任务中都不会使用 TFR 和 FLIR,因此你可能需要不时练习使用此套系统来维持对此系统的熟练度