机载雷达
阅读
2025-01-04更新
最新编辑:F-41地心鸦
阅读:
更新日期:2025-01-04
最新编辑:F-41地心鸦

机载雷达(Airborne Radars)是固定翼飞机安装的雷达系统,从二战机载雷达(F6F-5N的AN/APS-6、Do 217 N-1的FuG 202等)到现代机载雷达(歼-10A的1473型、AV-8B+的AN/APG-65Q、F-15C MSIP II的AN/APG-63(V)1等),不同国家在不同时间给各种飞机安装机载雷达。飞机安装并开启雷达(空战设置自动开启机载雷达),雷达界面将出现在玩家电脑屏幕的右侧, 机载雷达搜索到目标后在雷达界面上做标记。
雷达类型
目标搜索雷达
可以探测空中目标单位并将它们显示在雷达界面上(一般是“—”单横线和“ · ”圆点标记)。雷达安装敌我识别(IFF)友军单位显示“=”(双横线),没有安装敌我识别时,友军单位也标记单横线“—”。在游戏选项空战设置中关闭方形雷达界面是扇形雷达界面,以扇形排列雷达数据。设置开启方形雷达界面,左上方显示水平搜索角度X俯仰搜索角度,俯仰角度沿界面左边排列,最大探测距离在右上方,最小探测距离在右下方,水平角度沿界面上边排列,方形界面观看数据比较直观。有些目标搜索雷达作为单一的雷达安装在飞机上,比如:Do 217 N-1、苏-24M。
目标跟踪雷达
(雷达界面顶部显示TRK,完整名称Track跟踪),大多数目标跟踪雷达是配合目标搜索雷达工作的。机载雷达通常是首先在SRC模式进行目标搜索工作,之后搜索到目标允许玩家锁定目标,雷达界面顶部的SRC搜索字母变为TRK跟踪。玩家屏幕上在敌机的位置显示一个锁定框,锁定框右侧显示敌机距离,玩家和敌机之间的接近速度(接近速度由玩家速度矢量+目标的速度矢量,游戏选项计量单位径向速度可以更改单位m/s、km/h),锁定框下方圆圈+线条显示敌机速度矢量相对玩家雷达的指向(线条指向上方表示尾追,线条指向下方表示迎头)。敌机的雷达告警接收器 (RWR) 会提示敌跟踪,并伴随很响的告警声。
雷达测距仪
(雷达界面顶部显示ACQ,完整名称Acquisition截获)是一种目标截获雷达,界面的水平角度很窄。玩家无法操作搜索/跟踪目标,只能开关雷达测距仪,目标单位进入玩家机头正前方雷达截获距离时自动变为锁定,ACQ变为TRK,会触发附近其他玩家的RWR的敌跟踪警报。雷达测距仪的截获范围、跟踪范围通常很小,锁定敌机后不显示锁定框,没有敌我识别。第三人称视角雷达测距仪,机头前方截获距离内有目标标记一根横线,但座舱视角的HUD以“O”圈出被跟踪目标的位置(需要座舱视角的HUD支持,如:歼-7E)。
多功能雷达
搜索雷达和跟踪雷达的结合,整体性能超过搜索雷达和跟踪雷达的直接缝合,有丰富的功能(雷达界面顶部显示多个模式的组合)。主要的工作模式有SRC搜索、TRK跟踪等。主要的信号处理模式有PD 脉冲多普勒、MTI 动目标指示等。工作模式和各种的信号处理模式的组合,构成形态各异的对空对地作战雷达系统(SRC PD 脉冲多普勒搜索、TWS 边扫描边跟踪等)。比如:F-4S 鬼怪 II的AN/APG-59、▄米格-21 野牛的矛-21等等,属于多功能雷达。虽然多功能机载雷达可以运行搜索和跟踪等多种工作模式,但是由于使用一个天线进行搜索和跟踪,只能在一个时间运行一个模式或者不同时间运行不同模式。陆战防空车(M247、2S6等)的搜索雷达和跟踪雷达是两个设备和两个天线,跟踪雷达锁定目标时,防空搜索雷达持续搜索目标并更新数据。F-4系列、F-15系列、米格-23系列、苏-27系列等机型的机载雷达都是多功能雷达,后续的雷达技术改进使得工作模式和信号处理模式有很大变化。早期的机载雷达通常无法同时进行搜索和跟踪,即搜索敌机时无法跟踪敌机,跟踪敌机时无法搜索其他敌机(有些飞机搜索和跟踪雷达分开,比如:米格-19等)。之后的雷达出现TWS模式是先进的工作模式,发射搜索强度的信号再接收反射信号进行抑制地面海面杂波和保存目标数据等处理后更新跟踪数据,可以在搜索目标时跟踪多个空中或地面目标(TWS GMTI模式可以对地搜索跟踪)。
雷达操作模式
游戏内为模拟现实中的雷达设定了多种雷达模式。雷达操作模式描述了雷达的当前工况,玩家在机库点击内构,鼠标放在雷达模型上可查看雷达模式。雷达操作模式显示在雷达界面的顶部,雷达模式由一个或多个词组成:[工作模式]+[信号处理模式]+[信号处理模式]。雷达有多个正在运行的信号处理模式才显示相应的模式,否则只显示一个工作模式或者一个信号处理模式。 > 例如:第三代战机(新划分第四代战机)常见的SRC PD代表雷达处在[工作模式:SRC 搜索]+[信号处理模式:PD 脉冲多普勒]。SRC PDV HDN代表雷达处在[工作模式:SRC]+[信号处理模式:PDV脉冲多普勒速度门]+[信号处理模式:HDN迎头]。第二代战机常见的SRC代表雷达处在[工作模式:SRC搜索]+[信号处理模式:脉冲模式不显示]只显示一个工作模式。
雷达工作模式

SRC(Search)搜索
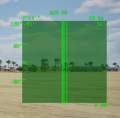
超视距模式的一种(实战能不能超视距作战取决于具体的雷达性能、导弹性能、机体速度高度等参数)。机载雷达对水平角度X俯仰角度范围和标尺距离内的空域进行扫描,探测到的目标在雷达界面显示“—”(单横线)或圆点“ · ”,雷达安装敌我识别(IFF)友军单位显示“=”(双横线),没有敌我识别时,友军单位也标记单横线“—”。雷达探测到多个目标,雷达选择的目标将会被标记两根竖线夹着横线“|—|”或者竖线夹着圆点“| · |”,按下选择目标键可以切换选中的目标。只要玩家被雷达搜索(包括队友和敌机),RWR上都会收到缓慢闪烁的告警,伴随间隔较长的告警声。搜索tips:在第三人称下,屏幕上方的浅绿色横线为雷达搜索范围,右侧上下切换位置的绿色竖线为当前雷达扫描平面,下方不停横移的线为当前雷达照射区域。玩家可根据这些指示器和雷达显示屏大致判断敌飞机当前空间位置,没有TWS(边扫描边跟踪)的玩家可以在不触发敌方跟踪告警的前提下知晓敌方位置
TRK(Track)跟踪
雷达搜索到多个目标,雷达选择的目标将会被标记两根竖线夹着横线“|—|”或者竖线夹着圆点“| · |”,选择多个敌机中的一个进行锁定。按下雷达锁定键短暂切换ACQ截获模式(通常只需0.1-0.5秒,截获失败卡住ACQ数秒不恢复SRC,要重启雷达),雷达尝试截获目标,成功截获目标立即变成跟踪模式(TRK),若雷达有格斗模式(ACM),且按下的是“雷达/红外搜索跟踪系统·切换超视距/视距内模式”则会切换到格斗模式(ACM),如果没有截获到目标,则一直保持ACM,期间可切换到其他模式,简而言之,锁定目标键是切换至ACQ,切换超视距/视距内键则是切换为ACM或其他模式。敌机的RWR会提示敌跟踪,伴随很响的告警声。玩家屏幕上在目标的位置显示一个锁定框,锁定框右侧显示目标距离,玩家和目标之间的接近速度(接近速度由玩家速度矢量+目标的速度矢量,游戏选项计量单位径向速度可以更改单位m/s、km/h),锁定框下方圆圈+线条显示敌机速度矢量相对玩家雷达的指向(线条指向上方表示敌人逃跑,线条指向下方表示敌人接近)。有雷达辅助瞄准功能的红外空空导弹,导弹导引头可以跟随TRK模式锁定框转动,在TWS模式和TRK模式,即使敌人距离很远,也会引导红外空空导弹导引头指向被锁定的目标。红外空空导弹发射后和机载雷达或IR系统断连,不能改变已发射红外空空导弹的指向。如果飞机装备对空弹道计算机(增强型航迹射击瞄具),当玩家距离被锁定的目标0.8公里以内时将出现一个预瞄准星,将准星放置在目标上开火即可命中(目标不改变航线才可能直接命中,考虑到网络延迟,准星应该再往前一些,即目标机头位置)。在超视距、空中格斗模式锁定目标都切换至TRK模式。
TRK模式是发射和引导半主动雷达空空导弹的必要条件,引导半主动雷达空空导弹需要保持TRK模式直至命中(AIM-7F/M和天闪 超级 TEMP中断1-3秒有小概率恢复跟踪,R-27R/ER中断重连允许间隔30秒甚至更久恢复跟踪)。
CWI(Continuous Wave Illuminator)连续波照射器,用于制导半主动雷达空空导弹。机载连续波照射器工作时发射能量很高的CW(Continuous Wave)连续波,雷达空空导弹接收从目标反射的连续波跟踪目标,敌机预热或发射半主动雷达空空导弹,若RWR有威胁类型提示,则CW亮起。若玩家RWR有敌机雷达频段的敌导弹信号告警,则CW和敌导弹同时亮起。以主动雷达空空导弹为主武器的飞机通常不安装连续波照射器(发射半主动雷达空空导弹用高脉冲重复频率引导),机载雷达引导主动雷达空空导弹阶段以数据链+惯性制导修正飞行方向,主动雷达空空导弹进入开机距离16km(部分导弹20km开机)由导引头自主跟踪目标。
TRK模式发射主动雷达空空导弹,不推荐使用TRK模式超视距发射主动雷达空空导弹,触发敌机的RWR敌跟踪,目前大多数主动雷达导弹没有中断重连功能,TRK模式一经中断而导弹未到有效跟踪距离16km就无法恢复制导。在导引头开机距离内(部分导弹20km开机)对RCS=2(雷达截面积=2)的战斗机有效跟踪距离16km,使用TRK模式发射主动雷达空空导弹就是射后不管,玩家发射导弹即可脱离。
TWS(Track While Scan)边扫描边跟踪
超视距模式的一种。TWS模式雷达照射强度是搜索(SRC)不是跟踪(TRK),不触发敌机的RWR雷达告警接收器敌跟踪获取多个敌机位置。玩家屏幕上出现一个虚线方框就是多架敌机中的一架敌机的位置。玩家飞机安装可视化RWR(能显示机型和信号方位的RWR)可以识别其他玩家雷达的型号和方位,反向侦察其他玩家位置,现象是机型在RWR上缓慢闪烁,和SRC的情况一样。雷达持续显示扫描到的目标位置,玩家屏幕上的虚线方框下方,圆圈+线条显示敌机速度矢量相对玩家雷达的指向(线条指向上方表示敌人逃跑,线条指向下方表示敌人接近),方形雷达界面上圆点“ · ”标记目标位置,圆点上方有横线“-”表示友军单位,无法选中。雷达界面上的接近速度矢量(标记目标的“ · ”中心向外伸出一根线表示速度矢量)。界面上1个圆点就是1个目标,圆点被竖线夹住“| · |”是被TWS模式选择的目标。机械扫描雷达TWS信息的准确率取决于雷达刷新率(刷新率是赫兹符号Hz,周期是完成一次搜索所需的秒符号s,刷新率和周期互为倒数),雷达刷新率越高信息越准确,狂风 F.3的窄TWS刷新周期是0.375秒,中等宽TWS刷新周期是1.5秒,苏-27SM的TWS刷新周期是3.7秒,F-15C MSIP II的窄TWS刷新周期是1.3秒,中宽度刷新周期是1.7秒。
TWS模式无法直接发射半主动雷达导弹。在TWS模式选择目标,按下雷达锁定键会切换TRK模式可以发射半主动雷达空空导弹,并且必须保持TRK模式制导直至导弹命中(例外:某一些拥有数据链重连功能的飞机,如米格-29等可以利用R-27ER的数据链中断重连功能,在退出TRK模式后可重新锁定敌人并继续制导R-27ER)。
TWS模式发射主动雷达空空导弹,主动雷达空空导弹导引头开机前依赖机载雷达数据链提供敌人位置。被探测到的目标在雷达界面上以圆点“ · ”标记。玩家屏幕上虚线方框选中的是下一发主动雷达空空导弹瞄准的目标,已经发射的主动雷达空空导弹能够分开攻击多少个敌人,取决于雷达数据链目标数量(比如:F-15C MSIP II数据链目标:8)。发射主动雷达空空导弹以后,不需要虚线框一直放在敌机位置上,只要确认敌机在雷达界面上就可以引导导弹攻击敌机,现象是雷达界面上标记敌人的圆点与标记主动雷达空空导弹飞行的线段相连。标记主动雷达空空导弹的线段“----—”由虚线部分和实线部分组成。虚线部分“-----”是机载雷达引导主动雷达空空导弹阶段,此时雷达界面上出现一个圆圈“O”,标记雷达空空导弹惯性制导(IOG)命中点。机载数据链可以刷新主动雷达空空导弹惯性制导(IOG)命中点(圆圈“O”套住目标的圆点“ · ”),机载雷达制导阶段,敌人的RWR只会收到SRC一样缓慢闪烁的告警。此时如果玩家发生主动关闭雷达、切换雷达模式、大幅度改变航向导致敌人离开雷达照射、飞机被击毁等情况,将会导致数据链中断,导弹无法刷新惯性制导(IOG)命中点(现象为圆圈离开圆点或者圆点消失只留下一个圆圈)。实线部分“—”是主动雷达空空导弹自主跟踪阶段。主动雷达空空导弹导引头自主跟踪敌机,被攻击的玩家可视化RWR(能显示机型和信号方位的RWR)显示MSL连线并有敌导弹告警。如果敌机成功规避导弹,会出现惯性制导(IOG)命中点(导弹有概率重新跟踪敌人),导弹会按照玩家屏幕上挂载的命中倒计时(武器名称左边的秒)飞向IOG命中点。
ACM(Air Combat Maneuvering)空中格斗模式
适用于近距离快速锁定目标的雷达模式。ACM以长条形垂直扫描(苏-27的ACM)或者机头指向小区域扫描(F-4S的ACM),ACM模式在雷达界面格斗距离内探测到目标时,雷达将自动切换到TRK模式跟踪目标,可以在任意飞行坡度进行锁定(一侧机翼倾斜指向地面,SRC和TWS在大坡度和倒飞时无法正常截获目标)。ACM模式不区分敌我,扫描区域对准目标即可锁定。
HMS(Helmet-Mounted Sights)头盔瞄准具
属于空中格斗模式的一种。HMS近似手动控制指向的小范围TRK(头瞄模式的机载雷达将不自动搜索敌人)。HMS通常在玩家视角中心的周围四个小绿点指示头盔瞄准区域,将敌机套在四个绿点围成的方形区域内按下雷达锁定键即可完成锁定。HMS模式不识别敌我,只要目标在瞄准区域内就可以锁定。注意:红外空空导弹导引头的头瞄功能不是雷达HMS模式,无论飞机是否开启雷达/红外搜索跟踪系统,红外空空导弹的头瞄始终有效。
HMS模式发射主动雷达空空导弹,导引头对战斗机有效跟踪距离是16km,北约成员国战机HMS模式通常是19km,中国、苏联、俄罗斯HMS模式是20km,中国部分飞机HMS模式是19km,在16km内锁定敌机发射主动雷达空空导弹就是射后不管,玩家发射导弹即可脱离。
LD(Look Down)下视
雷达天线从机头平视转向俯角扫描,然而没有脉冲多普勒模式抑制地面海面杂波,没有抗箔条干扰功能,区别于平视的脉冲模式。在米格-23ML的雷达上的现象是雷达高度1500米以下时,雷达俯角6°,雷达高度超过1500米,SRC模式俯角增加到42°。
| 雷达工作模式英文缩写的注解 | |||
|---|---|---|---|
| 雷达工作模式 | |||
| 模式名称 | 含义 | 功能 | |
| SRC | 搜索 (Search) |
常用的雷达模式,机载雷达对水平角度X俯仰角度范围和距离标尺内的空域进行扫描 | |
| ACQ | 截获 (Acquisition) |
跟踪雷达按下锁定后短暂出现,雷达测距仪上持续出现 | |
| TRK | 跟踪 (Track) |
雷达跟踪目标时的工作模式,雷达对某个目标进行持续照射,触发玩家RWR敌跟踪 | |
| HMS | 头盔瞄准具 (Helmet-Mounted Sights) |
使雷达扫描方向随玩家视角移动,与ACM模式不同,需要手动按下锁定,且无延迟补偿 支持头瞄的红外空空导弹的导引头恒定跟随玩家视角,和雷达HMS/HMD模式无关 | |
| ACM | 空中格斗 (Air Combat Maneuvering) |
雷达孔径模式扫描前部,搜索区域内有目标就自动锁定,游戏内ACM实际上包括BST和VSL | |
| BST | 视轴 (Boresight) |
方形的格斗锁定框,常见于美制雷达,游戏内实际未使用该词条 | |
| VSL | 垂直扫描锁定 (Vertical Scan Lock On) |
竖直长条形的格斗锁定框,常见于苏制雷达,游戏内实际未使用该词条 | |
| TWS | 边扫描边跟踪 (Track While Scan) |
搜索或跟踪多个目标且不触发RWR雷达告警接收器的敌跟踪,边扫描边跟踪属于SRC结合TRK的衍生模式 | |
| LD | 下视 (Look Down) |
只是让脉冲雷达俯仰角向下扫描,没有脉冲多普勒滤波功能,区别于平视的脉冲搜索 | |
信号处理模式
PULSE 脉冲
是雷达发射脉冲再用雷达接收敌机反射波获取敌人的位置(雷达界面中不显示)。脉冲模式擅长上视全向搜索/跟踪,通常情况是敌机高度略高于或者远高于玩家高度,玩家需要将机身或雷达指向天空搜索敌机。脉冲模式缺点:没有抑制地面海面杂波功能,现象是机头或雷达向下时出现高亮区域。没有抗箔条干扰功能,现象是SRC模式敌机发射箔条后雷达界面出现一堆横线,TRK模式锁定框固定在空中无法跟随敌人移动。脉冲模式有一种可以下视搜索的情况,玩家高度较高时离地面杂波较远,玩家飞机正下方出现敌人,目标飞行高度与玩家高度差距较小,此时的脉冲雷达可以下视搜索跟踪。SRC、TRK、ACM模式只显示单一工作模式是脉冲模式。注意:雷达空空导弹资料显示下射能力:迎头攻击是有抗干扰能力的导弹,导弹发射时未被干扰,雷达是脉冲模式被箔条干扰,只要敌机不离开雷达照射或者进行三九下高也能命中,敌机夹角与导弹成90°或者快速俯冲使脉冲雷达由于地面杂波干扰失去锁定可以中断制导。比如:AIM-7E-2系列、R-24R等。当敌机使用脉冲模式照射玩家时,若RWR有威胁类型提示,则PULSE亮起。
PD(Pulse Doppler) 脉冲多普勒
信号处理模式仅有PD没有HDN是中脉冲重复频率(MPRF),可以全向下视搜索跟踪目标。玩家飞机在中空或高空,目标在低空或超低空,需要机载雷达指向地面/海面搜索目标,如果在脉冲模式,目标信号会被地面海面杂波掩盖。脉冲多普勒(PD)雷达利用多普勒效应可在强杂波背景下检测运动目标并获取目标距离目标速度等信息。目标在超低空迎头或者尾部向着玩家都能被PD模式搜索或锁定。脉冲多普勒(PD)雷达对低空机动目标的搜索跟踪能力很强,目标航线与玩家雷达正对着,正面迎头0°-70°范围内时可抗箔条干扰,或者在敌机后方0°-45°范围内距离很近也可以抗箔条干扰。雷达空空导弹资料显示下射能力:迎头攻击或全向攻击,迎头攻击的半主动雷达空空导弹或者主动雷达空空导弹,实际上导弹动力段内可以尾后跟踪目标,全向攻击的雷达空空导弹尾后跟踪距离比迎头攻击的尾后跟踪距离更远。在敌机拥有全向脉冲多普勒的环境不建议直接用飞机尾部对着近距离的敌机。三九线机动加上发射箔条(玩家航线与敌机雷达夹角 90° 并且发射箔条)可以令PD雷达无法搜索、无法锁定或中断跟踪目标,现象是敌人接近速度低于某个数值时雷达锁定框消失(接近速度数值大小取决于雷达性能)。注意:单独的TWS没有HDN模式是PD信号处理模式。当敌机使用PD模式照射玩家时,若RWR有威胁类型提示,则MPRF亮起。
多普勒效应是波源与观察者相对运动时,观察者接收到的波长随着相对运动与波源发出的波长变化的情况。当波源接近时,波被压缩,波长变短,波频边高,当波源远离时,波被拉伸,波长变长,波频变低。生活中的例子:马路上的汽车快速驶来时噪音尖锐,汽车快速远离时噪音沉闷。多普勒效应在现代被广泛运用于航空航天领域,以AN/APG-66为例,机载脉冲多普勒雷达主要由天线、发射机、射频单元、信号处理器、计算机、雷达控制面板等部分组成。天线负责收发电磁波,射频单元负责产生和提取波形,信号处理器负责处理各种雷达信号,计算机负责自动化处理雷达各工作模式指令,雷达控制面板用于飞行员控制雷达的各种功能。雷达基本的工作流程:飞行员通过雷达控制面板选择适合的雷达模式,雷达计算机根据所选模式对射频单元发出指令,射频单元接收指令发出低功率的电信号,发射机将低功率的电信号放大成高功率的电信号,天线将高功率的电信号转换为电磁波。由天线发出电磁波照射目标,地面海面和目标反射波被天线接收并传输到射频单元,射频单元接收到大量的电磁波,是地面海面杂波和目标的反射波,射频单元将波形转换为低功率的电信号发送给信号处理器。此时雷达是观察者,地面海面和目标是波源,经过信号处理器的滤波、信号增益等处理,若目标相对运动速度与地面海面相对运动速度有明显区别,则会出现频率明显突出的波形,而后计算机处理为图形数据输出在雷达控制面板上供飞行员选择目标。现实中AN/APG-66具有空对空、空对地和空对海等模式,能够根据环境变化使用高脉冲重复频率(HPRF)、中脉冲重复频率(MPRF)和低脉冲重复频率(LPRF)信号模式,实现多用途作战的目的。脉冲重复频率(PRF)指的是机载雷达在一秒内发射多个脉冲信号的机制。脉冲重复频率单位是Hz雷达工作频率也是Hz,但是这两者不是同一个参数,脉冲重复频率一般是数百到数千Hz,雷达工作频率一般是数GHz到十数GHz。高脉冲重复频率是速度不模糊和距离严重模糊,中脉冲重复频率是速度模糊和距离模糊,低脉冲重复频率是速度严重模糊和距离不模糊。但是当目标的回波频谱与地面海面杂波频谱一致时,目标的回波被当作杂波处理,因而脉冲多普勒雷达无法搜索和跟踪接近速度与玩家空速相近的敌机,这是三九机动躲避脉冲多普勒雷达搜索和锁定的原因。但是脉冲多普勒雷达通常会对三九机动目标自动切换脉冲模式,此时雷达仍然能够正常跟踪目标,因此玩家三九机动的同时还需要发射箔条干扰脉冲模式。半主动雷达空空导弹和主动雷达空空导弹的目标回波接收器在导引头上,具有下射能力:迎头攻击或全向攻击是有抗干扰能力的导弹,仅发射箔条无法干扰导弹。因而玩家想要规避具有下射能力的导弹,需要与导弹飞行方向成三九点钟(不是与敌机雷达三九点钟),降低导引头对玩家飞机的回波接受率。三九机动+发射箔条成功的现象是能观察到敌人的导弹数秒后不提示敌导弹,并且向着玩家发射的箔条飞去。如果发射箔条后导弹仍然跟踪玩家,则是玩家未对导弹三九机动+发射箔条,有抗干扰能力的雷达空空导弹在玩家斜前方和斜后方仍然能够抗干扰跟踪,必须进行严格的三九机动+发射箔条。
PDV (Pulse Doppler Velocity)脉冲多普勒速度门
PD的一种。PDV与PD的明显区别是,PDV模式雷达界面右上方和右下方的Y轴标尺是速度(km/h),目标位于雷达界面的位置越高,目标接近速度越高。PD模式雷达界面右上方和右下方的Y轴标尺是距离(km)。脉冲多普勒雷达利用多普勒效应可在强杂波背景下检测运动目标并获取目标距离目标速度等信息。PDV模式擅长下视迎头搜索或跟踪,无法做到全向下视搜索跟踪,对高接近速度搜索跟踪效果很好,对目标接近速度要求较高。敌机接近速度要高出玩家飞机空速才可以搜索或锁定敌人。目标飞机侧后方对着玩家雷达的情况无法被搜索锁定,现象是雷达界面从0km/h到玩家飞机空速有一块高亮的区域(高亮区域就是速度门,随着玩家空速增大而出现,与地面杂波无关),接近速度在高亮区域的敌机无法被搜索/跟踪(即使目标飞机已经进入玩家肉眼可见的距离,目标在雷达界面上被高亮区域覆盖,这类情况在F-4S、F-4J、F-4J(UK)等飞机上常见)。SRC PDV模式只能看见敌机在速度标尺的位置(显示km/h,无法获取敌机距离信息),锁定目标后变成 TRK PD模式显示距离标尺(km),才能通过雷达界面和屏幕上的锁定框得知敌我距离和接近速度。
HDN(Head On)迎头
常与PD或PDV模式一同运行,是高脉冲重复频率(HPRF)。迎头模式相比全向下视搜索跟踪模式,提供更远的迎头搜索和锁定距离。HDN模式对高速迎头目标搜索跟踪效果很好,锁定框下方的圆圈加线条符号“O—”指向下方表示敌机在接近,可以稳定跟踪敌人。敌机与玩家迎头相遇时可抗干扰。无法搜索或跟踪接近速度很小的目标,目标航线相对玩家雷达指向角度接近90°或者敌人速度矢量逃离玩家。目标飞机尾部对着玩家雷达时,雷达无法搜索或锁定目标(现象是目标飞机已经进入玩家肉眼可见的距离,目标在雷达界面上消失,这类情况在F-4S、F-4J、F-4J(UK)等飞机上常见)。有的雷达HDN模式最小搜索距离不是0km,如苏-27切换HDN模式9km最小搜索距离、F14A/B的HDN模式5km最小搜索距离。建议米格29/苏27玩家对45km内目标使用SRC PD模式,SRC PD HDN仅用来强化45km以上的目标探测。不同型号的PD雷达实际搜索距离差异很大(实际搜索距离和雷达功率和目标的雷达反射截面积RCS等其他参数有关系)。有的战机并不一定用HDN模式,比如:F-15C MSIP II的APG-63(V)1的PD模式常用标尺74km(40海里)、AV-8B+的APG-65Q的PD模式常用标尺74km(40海里),它们的PD模式可以全向下视搜索/跟踪远处的第二第三代战斗机。注意:TWS HDN工作时是PD HDN信号处理模式。当敌机使用HDN模式照射玩家时,若RWR雷达告警接收器有威胁类型提示,则HPRF亮起。
MTI(Moving Target Indication)动目标指示
MTI模式是利用多普勒效应抑制固定物回波,检测并指示运动目标的脉冲雷达。MTI模式具有很强的地面海面杂波抑制能力,能从地面海面杂波中分辨出超低空的运动目标。在游戏中它是搜索距离较短,全向下视性能更好的PD模式(搜索或锁定速度门比PD模式的小),目标进入39线加上大量箔条(玩家航线与敌机雷达夹角 90°并且发射大量箔条 )才能够干扰MTI模式。注意:米格-23M系列和米格-23ML系列仅在雷达高度1500米以下(游戏选项空战设置显示高度类型:气压高度+雷达高度)雷达下视时自动切换SRC MTI,平视和上视时自动切换SRC,雷达高度超过1500米雷达下视变为SRC LD是脉冲模式,失去抗干扰能力。
GMTI(Ground Moving Target Indication)地面动目标指示模式
GMTI模式是利用多普勒效应抑制固定物回波,检测并指示运动目标的脉冲雷达。GMTI模式具有很强的地面海面杂波抑制能力,能从地面海面杂波中分辨出地面上的运动目标。GMTI模式出现苏-39的矛-25雷达、▄米格-21 野牛的矛-21雷达和苏-24M的Orion雷达上,可以搜索/跟踪地面上移动的目标,比如移动的坦克、防空车等,但不能搜索跟踪静止目标,现象是雷达不显示静止的地面目标。注意:TWS GMTI工作时是PD信号处理模式,然而速度门被设置得很小。即使坦克低速移动也能被搜索或跟踪。
RAM( Raid Assessment Tracking Mode)突袭评估跟踪模式,确认目标是单个还是多个飞机无法导引半主动雷达空空导弹,不触发敌跟踪告警。RAM模式目前在F-15A及其出口型号可用,在锁定敌人后按切换雷达模式键可以从TRK模式切换RAM模式。
| 雷达信号处理模式 | |||
|---|---|---|---|
| 模式名称 | 含义 | 功能 | |
| PULSE | 脉冲模式(雷达界面不显示脉冲模式,但RWR有威胁类型提示,遇到PULSE信号会亮起) | 雷达无法搜索跟踪被地面海面杂波覆盖的目标,能被箔条干扰搜索跟踪 | |
| PD | 脉冲多普勒 (Pulse Doppler) |
是中脉冲重复频率(MPRF)。利用多普勒效应有效抑制地面海面杂波和箔条干扰,可以搜索跟踪低空接近或远离的运动目标,但会被三九线机动加发射箔条干扰 | |
| PDV | 脉冲多普勒速度门 (Pulse Doppler Velocity Search) |
脉冲多普勒速度门模式是脉冲多普勒模式的一种,Y轴为相对速度(km/h)而非距离(km),搜索跟踪接近率大于玩家飞机空速的目标非常有效,搜索跟踪接近率小于玩家飞机空速的目标效果很差 | |
| HDN | 迎头 (Head On) |
常与PD和PDV模式一起运行,是高脉冲重复频率(HPRF)。HDN模式对高速迎头目标搜索跟踪效果很好,敌机与玩家迎头相遇时可抗干扰。无法搜索或跟踪三九线机动的目标,目标飞机尾部对着玩家雷达时,雷达无法搜索或锁定目标 | |
| MTI | 动目标指示 (Moving Target Indication) |
利用多普勒效应抑制固定物回波,检测并指示运动目标的模式, 直升机雷达的MTI可同时扫描空地目标。在游戏代码中,动目标指示属于脉冲多普勒模式 | |
| RAM | 突袭评估跟踪模式 (Raid Assessment Tracking Mode) |
确认目标是单个还是多个飞机 无法导引半主动雷达空空导弹,不触发敌锁定告警 | |
| GTM | 地面追踪模式 (Ground Tracking Mode) |
利用雷达扫描地面目标,只能扫描到地面载具 | |
| GMTI | 地面动目标指示 (Ground Moving Target Indication) |
利用多普勒效应抑制固定物回波,可以搜索/跟踪地面上移动的目标 | |
| AUT | 自动切换模式 (Auto) |
玩家无法手动切换的模式,在锁定时依据目标的接近速度,在目前锁定模式下自动切换子模式,若所有模式都无法继续锁定则向最后位置尝试照射。 优先级:TRK PD >TRK PD HDN >TRK > IR | |
| IR | 红外搜索与跟踪 (Infrared (Search and Track)) |
使用IRST红外搜索跟踪系统而非雷达搜索/跟踪目标,详见红外搜索跟踪系统 | |
设置与键位
| 游戏设置 | ||
|---|---|---|
| 空战设置名称 | 功能 | |
| 加入游戏后自动开启机载雷达 | 开启是自动开启机载雷达,关闭是玩家手动开启雷达 | |
| 使用方形雷达界面 | 开启是方形雷达界面,关闭是扇形雷达界面 | |
| 显示高度类型 | 气压高度是测量标准大气压高度与实际气压高度作为高度,雷达高度测量机身与地面之间的距离作为高度 | |
| 空军雷达循环切换目标 | 开启是由游戏自行选中目标,关闭是玩家手动控制雷达光标选中目标 | |
| 按键设置(键盘鼠标高级预设) | ||
| 按键名称 | 功能 | 默认键位 |
| 雷达/红外系统·选择锁定对象 | 通常在SRC和TWS模式内选择雷达界面中的目标(两根竖线夹着一根横线或圆点是已选择目标)每按下一次依照雷达扫描顺序切换目标 | T+ALT |
| 雷达/红外系统·锁定目标 | 锁定在雷达界面上被选择的目标,锁定时目标不在雷达标记位置,雷达会尝试搜索数秒有时导致雷达卡在ACQ,关闭雷达再打开即可 | F+ALT |
| 雷达/红外·指示目标方位(X轴) | 手动控制雷达游标选择水平方向的目标 | - |
| 雷达/红外·指示目标距离(Y轴) | 手动控制雷达选择雷达界面距离(km)或速度(km/h)的目标 | - |
| 雷达/红外·指示目标仰角 | 手动控制雷达俯仰角(垂直方向)的转动 | - |
| 雷达/红外系统·开关搜索 | 打开或关闭雷达 | R+Alt |
| 雷达/红外系统·切换传感器类型 | 切换SRC(雷达搜索)和SRC IR(红外搜索要求飞机上有IRST) | ALT+A |
| 雷达/红外系统·切换模式 | 切换雷达工作、信号模式 | ALT+B |
| 雷达/红外系统·切换超视距/视距内模式 | 切换雷达的ACM空中格斗模式、HMS模式(若雷达有头盔瞄准具) | ALT+W |
| 雷达/红外系统·切换搜索模式 | 切换雷达的搜索俯仰角度水平角度,搜索角度越大刷新频率越低 | ALT+D |
| 雷达/红外系统俯仰稳定 | 切换雷达跟随机头指向或指向地平线 | --- |
| 雷达/红外系统视轴回中 | 雷达的指向回到机头指向,此操作会强行中断正在进行的TWS操作 | --- |
| 雷达/红外系统·切换显示器标尺 | 切换雷达界面搜索距离远近(目标在距离标尺外,即使雷达性能足够搜索也不显示) | ALT+Q |
媒体
画廊

扇形雷达界面。

APG-66的方形雷达界面,可见其处于SRC PD脉冲多普勒搜索模式,扫描37km内随着机头指向60° × 14°范围内的目标。
APG-66雷达的格斗模式屏幕,雷达在机头指向7° × 8°长方格内不断扫描并尝试截获,标尺显示为19km。这是在模拟现实中的孔径模式。


