空中扫荡与护航
阅读
2025-09-12更新
最新编辑:退tui
阅读:
更新日期:2025-09-12
最新编辑:退tui
介绍
未来的任意一场空战都必然包含部分进攻任务。要想成功完成对存在空中威胁进行护卫的敌方目标的打击任务,那么此类任务必然需要专门的制空战机担任扫荡(Sweep)和/或护航(Escort)角色。鉴于在一般的战役中,制空战机数量有限,因此在攻击任务中,这些战机必须高效的发挥出他们的制空能力。本章的旨在建立一个关于制空战机扫荡和护航任务的通用框架和参照基准。由于关于运输机或直升机的支援(扫荡和护航)任务相对特殊,机组人员必须了解附录1中详述的具体情况。可能的情况下,空对空的前五章中所建立的程序、策略和指南均适用于本章中的场景。
威胁
就本章中的场景而言,可能的威胁包括地对空导弹(SAM),防空炮(AAA)、点防御系统和/或区域防御战机所组成的防御群组。这些威胁可能会有敌方的对空指挥通信与控制系统(C3)及其电子战(ECM)/电子支援系统(ESM)进行支援。我们将假定敌方制空战机的目标是我方执行对地攻击任务的战机,同时他们也会试图避免与我方的空优机进行交战。敌方单位在任何气象条件下都有可能执行拦截任务。
定义
扫荡
执行扫荡(Sweep)任务的战机的目标是发现并摧毁敌机。这些制空战机既可以指派为其他的友军单位提供间接支援,也可以让其执行独立任务。执行间接支援的制空战机的任务时间线至少需比友军单位提前2分钟或者是与友军的横向距离应保持在10海里内。
护航
护航(Escort)指制空战机直接对友军飞机施予保护。护航任务分为以下两种类型:
- 分离式护航(Detached Escort)
- 当制空战机被指派为分离式护航任务时,制空战机的任务时间提前量应少于2分钟或是与友军打击包(Package)的横向距离应少于10海里。这些制空战机可既可以维持友机目视,也可以不与友机进行目视接触。
- 近距离护航/嵌入式护航(Close Escort)
- 当战机被指派进行近距离护航是,他们应加入或贴近友机打击包(Package)集群。这些制空战机不论是在友军打击包侧面进行伴飞还是加入打击包,都应维持与友军单位的目视接触。在打击包中,执行嵌入式护航任务的制空战机会被称为“嵌入式护航机”(Embedded Escort)。在打击包集群中执行对地攻击任务的飞机会被称为“有机护航机”(Organic Escort)。由于大多数执行轰炸任务的现代战机空对空自卫能力的提高,近距离护航任务出现的概率也相对低很多。
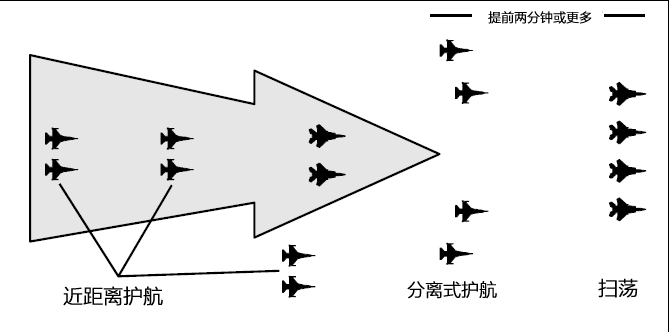
图1:护航与扫荡示例图

任务目标
通过消灭敌方空优机的方式,建立局部空中优势,支援友军的进攻性空中任务。
场景假设
本章中所提及的程序和战术都建立在以下假设条件下:
- 存在具备击落/干扰执行打击任务的友机的能力的敌对空中威胁
- 执行扫荡/护航任务的单位将会与其他执行空中任务的友军进行协调并消除冲突
- 穿越前线(Cross-FLOT):此场景中与敌机的交战规则(ROE)将由上级部门确定,并在空中任务指令(Air Tasking Order)中进行发布
- BVR交战需要主动对目标进行识别后才可进行
- 拥有充足的规划时间。对于护航任务,打击包(Package)领队和制空战机领队间的协调至关重要
任务规划要素
能见度/地形
任务区域的能见度和/或地形将决定护航方式的选择。在能见度较低的条件下(夜间和/或 仪表气象条件(IMC))和/或在起伏的地形中低空飞行时,近距离护航将无法进行。
穿越前线
当所有的飞机在执行需穿越前线的任务时都必须清楚了解并遵守敌我识别(IFF)流程、交战规则和防冲突标准。交战规则的指导将会在空中任务指令中详细公布出来,它必须包含部分或所有以下的交战准则(Criteria):
- 被其他非机载平台所识别的目标;
- 缺少友军IFF回应的目标;
- 缺少IFF回应的情况下没有遵守空域管制措施的目标;
- 无友军执行任务的区域;
- 或被识别为敌机的目标
鉴于现代制空战机的杀伤力,飞机必须回应特定格式的IFF代码和/或遵守限制性的空域管制措施。
战机能力
具备特定能力的制空战机相比其他飞机更能胜任扫荡/护航任务。考虑的重点包括:搭载多普勒雷达、主动雷达弹发射能力、电子目标识别(EID)能力、机组夜视组件和是否搭载了联合战术详细分发系统(JTIDS)(译注:指是否兼容Link-16)
支援单位
支援单位例如E-3预警机,其能力和执勤位置可能会影响扫荡和护航任务的方案选择。
兵力组成
制空战机的数量将取决于此任务中要面对的威胁、态势和执行对地打击任务的友军打击包(Package),及其空对地战机所具备的能力。
任务的指派
对于扫荡和护送任务,CAOC将会通过空中任务指令(ATO)来指派制空战机执行这些任务。CAOC应当指派现存的最适合这些任务的战机执行任务,理想情况下这些战机应配备有多普勒雷达,挂载主动雷达导弹(FOX-3)并搭载有RWR/ECM设备。由于不是所有战机平台都可以统一挂载,也并非所有飞机都可以在所有条件下完成扫荡和护航任务,特别是在夜间/IMC条件下。因此在执行需要进入敌方空域的扫荡和护航任务前,规划者应参考“具备扫荡和护航能力的战机平台图表”(见图1)。在规划扫荡和护航任务时,CAOC人员/机组成员应参考附录2中所罗列的注意事项和简报项目。ATO可以参考在图2中列出来的扫荡与护航战术代码
| 战机 | 日间/夜间/IMC(仪表气象条件) | 日间/夜间/IMC(仪表气象条件) | 日间/夜间/IMC(仪表气象条件) | |
|---|---|---|---|---|
| F-15 | 是 / 是 / 是 | 是 / 是 / 是 | 是 / 是 / 是 | 扫荡 (见注 #1) |
| F-18 E/F | 是 / 是 / 是 | 是 / 是 / 是 | 是 / 是 / 是 | 无 |
| F-18 C/D | 是 / 是 / 是 | 是/是/是 | 是/是/是 | 无 |
| F-16 MLU | 是 / 是 / 是 | 是/是/否7 | 是/否7/否7 | 无 |
| F-16 C | 是/是/是 | 是/是/是 | 是/是/是 | 扫荡 |
| F-3 | 是 / 是 / 是 | 是 / 是 / 是 | 是 / 是 / 是2 | 由威胁和打击包的组成而定 |
| CF-18 | 是 / 是 / 是 | 是 / 是 / 是 | 是 / 是 / 是 | 扫荡 |
| MIRAGE 2000 - 5 F | 是 / 否 / 否 | 是 / 是3/ 否 | 是 / 否 / 否 | 无 |
| EF-18 A | 是 / 是 / 是 | 是 / 是6/ 否 | 是 / 是6/ 否 | 扫荡 |
| F-4F ICE | 是 / 是 / 否 | 是 / 是 / 否 | 是 / 是 / 否 | 扫荡 |
| AV 8+ | 是 / 是 / 否 | 是 / 是/ 否 | 是 / 是 / 否 | 分离式护航 |
| FA-2 | 是 / 是 / 否 | 是 / 是 / 否 | 是 / 否 / 否 | 扫荡 |
| F-16 A (DA, NL) | 是 / 是 / 否 | 是 / 否 / 否 | 是 / 否 / 否 | 无 |
| F-16 A (BE) | 是 / 是4/ 否 | 是 / 否 / 否 | 是 / 否 / 否 | 1. 扫荡
2. 分离式护航 3. 加入群组护航 |
| F-4 F | 是 / 否 / 否 | 是 / 否 / 否 | 否 / 否 / 否 | 扫荡 |
| HAWK | 否 / 否 / 否 | 否 / 否 / 否 | 否 / 否 / 否 | 见注 #5 |
| 列 1 | 不言自明 | |||
| 列 2 | 制空战机是否具备在昼间/夜间/仪表气象条件下在执行扫荡任务时穿越前方战线(Cross-FLOT)的能力 | |||
| 列 3 | 制空战机是否具备在昼间/夜间/仪表气象条件下在执行分离式护航任务时穿越前方战线(Cross-FLOT)的能力 | |||
| 列 4 | 制空战机是否具备在昼间/夜间/仪表气象条件下在执行嵌入式护航任务时穿越前方战线(Cross-FLOT)的能力 | |||
| 列 5 | 每种制空战机的任务偏好是什么? | |||
| 注 1 | 当担任扫荡任务时,F-15的远程交战和识别能力可发挥到极致。嵌入式护航是最不适合F-15执行的任务类型,因为F-15想要在敌机BVR导弹的射程覆盖到友机前与之交战是非常难的。 | |||
| 注 2 | 由于 F-3 没有地形跟踪雷达,能否作为嵌入式护航机型飞行将取决于计划飞行高度。在夜间 VMC 条件下,NVG 可提供良好的夜间低空能力。 | |||
| 注 3 | 计划飞行高度为 10,000 至 20,000 英尺。 | |||
| 注 4 | 仅限于中高空任务。(译注:指高度在10,000ft以上) | |||
| 注 5 | 在特殊情况和良性环境下,可分配于嵌入式护航任务。 | |||
| 注 6 | 飞机数量有限。 | |||
| 注 7 | ||||
| 任务 | 代码 |
|---|---|
| 沿着复合空中任务(COMAO)路径执行扫荡任务 | FS-1A |
| 沿着COMAO路径的左侧执行扫荡任务 | FS-1B |
| 沿着COMAO路径的右侧执行扫荡任务 | FS-1C |
| 独立的扫荡任务 | FS-1D |
| 在打击包(Package)前方执行分离式护航 | FS-2A |
| 在打击包(Package)左侧执行分离式护航 | FS-2B |
| 在打击包(Package)右侧执行分离式护航 | FS-2C |
| 加入到打击包中执行嵌入式护航 | FS-3A |
| 加入到打击包左侧执行嵌入式护航 | FS-3B |
| 加入到打击包右侧执行嵌入式护航 | FS-3C |
通联
- 所有制空战机、空对地飞机和空中监控与控制系统(ASACS)的管制人员都应监听单个UHF或VHF频率。与打击包(Package)相关的信息应在此公共频率上传输。flight(小队)内部的通信应在另一个独立的频率上进行传输。如果所有机型都支持跳频功能,则通联时应使用跳频。
- 为提高态势感知,靶眼应设置到目标处。
- 战术/IDM颜色(colour)呼号需要进行确定。
- 是否执行威胁通报(Threat call)取决于当时的态势、敌机能力、目标方向角(aspect)和目标接近率。为了最小化通讯拥堵,对威胁的通报只在之前未被探测到的敌机突然出现,且具有高逼近率(hot)运动矢量、位置位于被支援的打击包和/或制空战机的15海里范围内时执行。
目标信息
在第一章FAOR中叙述的目标信息节内容也适用于本章,但是标准靶眼参考点应定位于目标和/或其他地理参考点处。
指挥与控制
需要指定一名对战术态势最为了解的总战斗管理员,此职位通常应由ASACS管制员担任。战斗管理员需协调单位、监控敌方电子战态势并监视任务状态。
方案选择
态势、威胁、制空战机的能力、需求战术、支援资产的数量、友军支援机的能力以及天气条件都将影响“扫荡”和“护航”的决策。空对地打击包(Package)领队/CAOC任务负责人在分析上述要素并与制空战机领队协商后,将决定任务所适用的方案(见图3)。如果必须穿越FLOT(前线)/威胁,那么在穿越相关的地对空威胁时,制空战机可能需要修改其战术。以下几点叙述了“扫荡”和“护航”战术的对比:
扫荡
执行扫荡的制空战机具有最大的战术灵活性,这能让制空战机的战术可选项变多。依据交战规则(ROE)的不同,BVR战术效果也能得到不同程度的提升,同时此扫荡方案可让制空战机的风险降至最低。如果扫荡是为了间接支援其他友军飞机,那么所需的协调工作也将是最少的,制空战机也可以在雷达不照射到友军的前提下完成任务。此外,执行扫荡的制空战机最有可能在敌机的武器有效范围(WEZ)覆盖到要保护的友军之前将其拦截。如果发生与敌机的交汇,制空战机可以在交战后转换到分离式护航(Detached Escort)来为友军提供交战后支援。当配备主动雷达导弹时,执行扫荡任务的战机可以拦截更大角度区域的来犯敌机,以防敌机包抄友军单位。
分离式护航(Detached Escort)
当制空战机被指派为分离式护航时,其战术弹性小于执行扫荡战术的制空战机。弹性的降低会导致可用的空战战术可选项变少,也会限制BVR战术效果的发挥,制空战机要面对的风险也会增加。因为分离式护航是一种对友军单位提供直接式的支援战术,因此所需的协调将会增加,制空战机的雷达也可能会照射到友军。如果出现了与敌机交汇的情况,制空战机可以转换为嵌入式护航来提供交战后支援。与扫荡相比,执行分离式护航的制空战机被关键威胁包抄的概率较低,与非关键威胁交战的可能性也较小。
嵌入式护航(Embedded Escort)
执行嵌入式护航的制空战机的战术灵活性最低,因为他们直接属于打击包的一部分。最低的灵活性将进一步限制战术的选择,进一步阻碍BVR战术的效果,制空战机需要面对的威胁也将进一步增加。由于 “嵌入式护航 ”可能是最后一道防线,因此它们的机动自由度最小,制空战机的交战决定标准(commit criteria)也更严格。这些制空战机将需要最多的协调工作,且雷达肯定会照射到友军单位。如果发生与敌机的交汇,制空战机无法提供交战后支援。相反,嵌入式护航的制空战机被主要威胁包抄的可能性最小,也最不可能与非主要威胁进行交战。
| 扫荡 | 分离式护航 | 嵌入式/有机护航 | |
|---|---|---|---|
| 1.战术灵活性 | 高 | 低 | 最低 |
| 2.能自由的执行防御性措施的同时完成任务 | 高几率 | 低几率 | 最低几率 |
| 3.协调需求度 | 最小 | 多 | 最多 |
| 4.交战决定标准(commit criteria) | 最少限制 | 多限制 | 最多限制 |
| 5.给予空对地打击包的威胁预警效果 | 最高 | 低 | 最低 |
| 6.夜间/IMC条件下的兼容性 | 高兼容性 | 低兼容性 | 最低兼容性 |
| 7.制空战机所要面对的威胁度 | 中 - 低 | 中 | 中 - 高 |
| 8.被诱饵影响或与非关键威胁交战的几率 | 最大 | 小 | 最小 |
进入任务区(Ingress)
电磁管制(EMCON)
简报时需要包含的电磁管制的内容有:EMCON级别、电磁辐射开启("turn on")的时间点和应急方案
编队
在第二章:MFFO中的编队章节所述内容也适用于本章。如果执行扫荡的制空战机决定在BVR中使用多轮的发射并撤离(launch and leave)战术,则在简报时需要确定制空战机和其被保护的打击包的前后(in-trail)距离和任务时间线的时间差。
雷达搜索
制空战机必须建立雷达搜索模式,以扫描责任区并探测远距离雷达接触。雷达能力、雷达限制、飞行准备时间和手册中规定的准则将决定雷达使用的具体情况。
拦截
通常情况下,在这一阶段,制空战机应只与那些对制空战机和/或受支援的打击包(Package)构成威胁的敌机进行交战。在某些情况下,避开没有攻击倾向的敌机比主动出击更好,这样能够避免敌方发现打击包的攻击倾向。
做出拦截决定(commit)的标准
与所有制空任务一样,制空战机领队/ASACS管制员在做出拦截决定时必须权衡战术态势感知、任务目标、制空战机能力和威胁。对于执行扫荡或分离式护航的制空战机来说,一个重要的考虑因素是与友军打击包机群长度相关的敌方威胁距离/方位角。比如在一个例子中:对于执行扫荡/护航的制空战机看来,他们探测到的威胁可能看似是一个不对自身/友机产生威胁的非重要威胁,但是实际上他们正计划绕过制空战机,直接攻击后方的空对地机群。另一个决定是否拦截的重要因素是:其他执行扫荡/护航单位的状态和能力。假设打击包的机群长度较短,那么可以参照图4来确定需要交战的敌机距离。
| 情形 | 距离 |
|---|---|
| 扫荡(配备主动雷达导弹) | <40海里 |
| 单独执行分离式护航 | 30海里 |
| 与其他单位一起执行分离式护航 | 20 - 30海里 |
| 嵌入式/有机护航 | 20-30海里 |
想要确定交战决定(commit)的标准距离,另一个有用的办法是充分研究地图,评估威胁的地理位置与打击包之间的几何关系。制空战机应提前做出决定是否交战,以便在关键威胁所携带的武器对友军飞机形成有效威胁(WEZ覆盖到友机)之前与关键威胁交战和/或消解。如果已知敌军数量,则应让至少1:2兵力比的制空战机与敌机交战。其余的制空战机应保持其 扫荡/护航的站位并监视局势。如果威胁数量不明,则制空战机领队/ASACS管制员应只投入部分的制空战机来交战。在交战过程中,制空战机领队可能希望让友军打击包转向到特定航向或在特定位置盘旋,以阻碍/削弱敌机的攻击效果。
编队
在第二章MFFO中所述的拦截章节中的编队小节中的内容适用于本章假定场景中单位的交战场景。
索敌(targeting)与目标分配(sorting)
在第二章:MFFO中拦截部分的索敌和目标分配小节中的内容也适用于本小节。在拦截过程中,制空战机应利用所有可用的机载航电设备和来自ASACS管制员的信息,来了解那些会对友机或制空战机造成威胁的敌军态势。
拦截方案
拦截方案的选择取决于场景、制空战机的数量/能力以及任务指挥官的意愿。对于只装备了半主动/红外导弹的制空战机所适用的拦截方案已在第二章:MFFO中的拦截章节中说明。在所有的拦截方案中,制空战机都应尽可能多的拦截和/或干扰敌机,以防剩余存活的敌机威胁到要保护的友军单位。所选择的拦截方案一定要保证制空战机的站位始终位于敌机和受保护的友军的中间。这一目标可能会导致制空战机不能相对威胁偏置到某一航向。制空战机的领队需要在任务开始前的简报中介绍具体的拦截方案。
交汇(Merge)
视距内交战/交汇时的理念取决于制空战机领队的期望、每架制空战机的武器/雷达性能以及敌机。携带主动雷达弹的制空战机可以在进入交汇前就锁定并击落多个敌机。与之相对的是,只携带了半主动/红外导弹的制空战机则必须与敌机交汇后才有可能击落敌机。执行"扫荡"和"护航"任务的制空战机可能不得不接受更高的风险水平以完成任务目标。在友机脱离威胁之前,制空战机可能有必要与敌机进行交汇以牵制敌机在固定地点。如果发生交汇,应考虑以下因素:
- 当战术态势感知较低/寡不敌众时,制空战机应尽量避免转向,直接向敌机飞行以进行交汇。此时需考虑将威胁机群进行战斗隔离以让其远离受保护的友机(见MFFO中的图例)。
- 当战术态势感知较高/敌机数量有限时,制空战机应只攻击关键威胁。
交汇后
制空战机应飞离交汇/攻击轴线,依据简报中提及的计划飞行路线,继续执行扫荡/回到COMAO打击包中的护航位置上。在重新加入护航时,制空战机要避免直接飞向友机打击包群或雷达照射到友方打击包。
目标区域责任
制空战机需要净空目标区域以及外围空域。制空战机只有在需要完成任务目标且不会妨碍到其他友方单位的前提下才能进入目标区域。制空战机需要避免在目标区域中执行战斗巡逻(CAP)。制空战机机组需要针对可能的威胁来源(如附近的机场)制定对应的时间线或流程计划,来保证既能获取到空中优势的同时又不会不必要的让敌方预测到我方意图。
撤离任务区域
必须使用确定时间点和无线电通报来识别最后一个离开目标区域的友军打击单位。假设所有的对地打击单位都具有雷达和对空战斗能力,那么在撤离的过程中扫荡机的最佳应对方案就是扫荡撤离路线。
参考资料
688750169-80
| |||||||||||||||||||||||||||