COMAO第四章:任务规划要素
阅读
2024-11-26更新
最新编辑:glamcurrent
阅读:
更新日期:2024-11-26
最新编辑:glamcurrent
综述
FF和FP方案的构建都需要COMAO协调员、Package领队、任务领队小心谨慎的规划,这样才能保证COMAO能够正确的执行和避免出现友军误击。本章将讨论规划要素,以及规划FF/FP时可使用的选项。本章将会深入到以下方面:
- 集合流程
- 任务区域进入方案
- 任务区域撤离方案
- 威胁响应
- 任务区域战术/流程
集合流程
简介
FP/FF机群需要在进入敌军区域前集合并保有足够的油量。本节将会介绍三种集合FF/FP部队成员的方式。集合(RV)计划必须要在时间和/或高度上消除冲突,以考虑到通信干扰、天气条件和夜间情况。
规划要素
在制定和执行RV计划时,应遵循以下标准规则:
- VMC(目视气象条件)
- 在VMC中,最大4机的编队的高度间距应至少大于1000英尺。
- IMC(仪表气象条件)/夜间
- 在仪表气象条件或夜间条件下,最大4机的编队的高度间距应至少大于2000英尺
- RV点和RV区域
- 只要有可能,就应将RV点和RV区域设在敌方火力和/或预警雷达无法直接覆盖的区域
- 时间安排准则
- 如果在飞行途中,出现无法满足预定时间点的情况时(如:到达时间参考点(TRP)的时间+/-10秒于预定时间),机组有责任与其他的Package组员保持安全间距(高度间距或平面间距),直到建立/重新建立目视接触(在VMC下)
- 参数
- 本章详细介绍的参数是一个基准标准。但是,如果所有相关人员都了解态势,且更改不会危及飞行安全,则可进行更改。
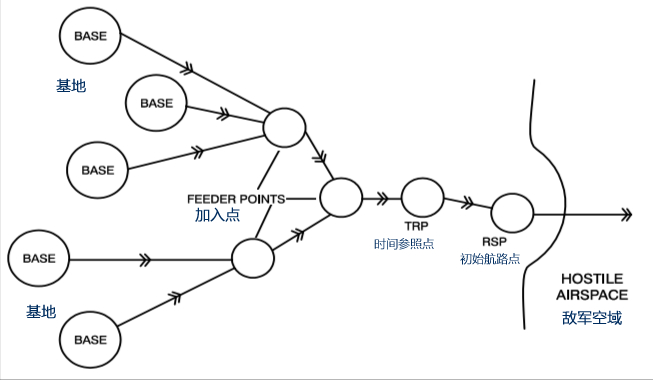
跑马道(Join-1)
trombone(跑马道/长号)是一种用于让小型或中型规模Package中的飞机从单个或多个临近的空军基地起飞,在某处集合/等待的方式。为了按时到达下个路径点,飞机需要调整他们机群的等待航线(如:在进入预定航路前进行跑马道集合)
参数
- 20海里长的跑马道等待航线,与计划航线平行 - 左盘旋
- 地速(GS)为360 kts
要素
- 可能需要指定跑马道集合的高度,直到Package中的所有飞机都准确和准时的位于跑马道上,然后再飞向下一个时间参考点(TRP)或RSP(航路起始点,Route Start Point)。
- 此方案特别适合在低空气流中使用
在途加入(Join-2)
Enroute join-up(在途加入)方式会指定多个加入点(Feeder Points)来让参加任务的飞机在同个航路上建立编队,机群会在预定的时间在预定航路点上集合完成。
参数
- 为了解决冲突,飞机在靠近和远离加入点时必须保持ATO中指定的高度,直到可以建立准时到达TRP/RSP的状态。
- 离开加入点的地速应为420 kts
要素
- 加入点可以是在SUPPLAN 35001M路径的转向点
- 在RSP时,所有的飞机应都位于预定航路上,且准时、以正确的速度飞行、在正确的进入高度(ingress altitude)上
- 此方案可在任意高度上执行,但在强迎风条件下,可能无法维持较高的地速。
在途加入

集合区加入(Join-3)
集合区(RVA)是用于大量飞机进行集合/原地等待的特定空域区块。集合区也非常适合进行空加作业。该方案可能需要使用限制任务区(ROZ),在该区域内,跑马道会合区将以横向或纵向排开。RVA方案会在CAOC级别的部门进行协调和制定,并在ATO中发布。
假设
以下假设适用于Join-3的部署:
- 飞机编队的高度区间将在 ATO 中分配。
- 在防止高度区间冲突时,所有执行任务的飞机将按照指示使用标准大气压(QNH或1013mb/29.92英寸汞柱)。
参数
- 12海里长的跑马道,以相对长边并列排开 - 左转向
- 速度360节/0.7mach,或让加油机的速度符合ATP 56标准。
- 在ATO中指定用于到达(在 RVA 进入点前 20 英里处确定)、会合、停留、空加和起飞的高度的高度标准。
考虑要素
- 在RVA区域集结飞向TRP点时,应按时建立Package队形。到达RSP点时,所有飞机都应准时、以正确的速度和高度进入预定航线。
- 此方式适用于任何高度,但战机的性能和重量将决定RVA的最大高度/高度层。
目标区域进入方案
概述
任务flightd的总体飞行高度方案和区域package进入目标区域(ingress)的队形方案取决于态势、威胁、支援资产的数量/类型、飞机能力、地形及其天气。支援资产的运用对于中/高空方案的成功至关重要,如果没有支援资产,任务结果将会是灾难性的失败。如果对威胁情报存在任何的质疑,那么请选择低空进入方案,而不是中/高空方案,因为来自防空导弹和制空战机的总体威胁可能相对更大。CAOC将会决定flight的总体飞行高度方案和Package编队方案,并计划和协调选择的进入方案。本节涉及以下进场/离场方案:
- 飞行高度方案
-
- 低空(PR-1)
- 中空(PR-2)
- 高-低-高(PR-3)
- 高-低-低(PR-4)
- Package编队方案
-
- Stream(FM-1)
- Horizontal Spread (FM-2)
- Vertical Stack (FM-3)
- Wall (FM-4)
低空(PR-1)
该方案可用于高威胁(防空导弹和空对空(A/A))的环境下,此方案要求所有的Package在低空进/处目标区域。
- 优点
-
- 可提供较短的暴露时间,并能实现奇袭效果
- 敌军的空中优势将不具效果
- 相比其他方案,对SEAD支援的依赖性更低
- 缺点
-
- 飞机航程受限
- 短程地对空将会是关键威胁,特别是对于在steam编队中,位于机群边缘的机组
- 恶劣天气条件会限制此方案的执行,除非飞机具备IMC/夜间飞行能力或是地形跟踪(TFR)能力
中空(PR-2)
中空方案可能可以用于当敌军的综合防空系统(IADS)中存在大的间隙时使用,或者是敌方的地对空和空对空威胁水平较低时。此方案需要专门的SEAD支援部队来保护Package。
高-低-高(PR-3)
当油料/距离是必须要考虑的要素时,则可考虑“高-低-高”(High - Low - High)方案。根据威胁和可用的支援资产,在穿越FEBA(前线)之前或之后,Package将在高空飞向RSP或TRP。然后Package将会下降到低空,继续飞向目标,在撤离阶段,在穿越FEBA之前/后飞向撤离点(egress)时,将在此点爬升回高空。在高威胁环境中,当负责保护COMAO部队的资产不可用时,任务中高空飞行部分必须在预期威胁等级较低的地区进行。
高-低-低(PR-4)
当油料/距离是必须要考虑的要素时,也可使用“高-低-低”(High - Low - Low)方案。此方案尤其适用于Package以中高空进入,并考虑将撤离作为任务关键要素时。或者是在特定任务场景中,只在进入阶段拥有SEAD支援,但在撤离阶段无SEAD支援时使用。
中/高空方案的优劣总结
- 优点
-
- 某些 AAA/SAM 系统可能不再构成威胁
- 目标索敌更容易
- 能够增加飞机航程
- 可以在夜间或恶劣天气下执行任务
- 缺点
-
- 空中优势/制空权和/或SEAD支援对此类方案是否能成功执行起到至关重要的影响
- 当遇到强风时,可能会遇到无法按照预定时间执行的问题
- 可能需要更大的TOT窗口
- 对于某些飞机来说,升级导航设备比较难(译注:就是难以进行精确导航)
- 天气情况可能对某些低性能飞机影响较大
- 奇袭性可能会因为高暴露度而消失
- 高空的航迹云可能会暴露机群的队形
- 由于重量/性能的原因,某些飞机在进场阶段(ingress)的最高高度可能会受到限制。
- 非制导武器的精度可能会降低
- 某些武器可能会被排除在可选装备表外(参见:JP-233和MW-1)
队形方案
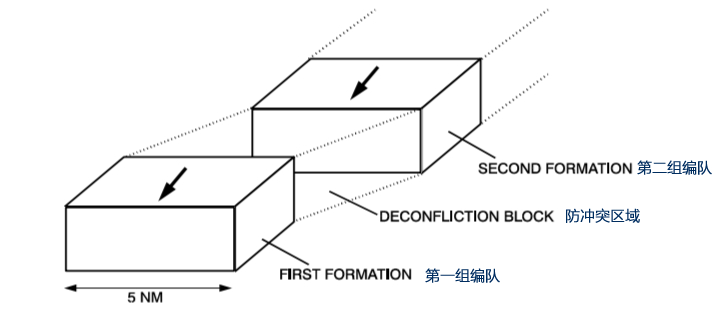
Stream队形(FM-1)
Stream队形是在Package部队在低空飞行或者是在穿越密集威胁带时合适的编队方案。此方案也可以在中/高空执行,前提是任务区域已取得空中优势和/或是有合适的SEAD和防空资产提供支援。编队中的所有飞机的速度和计划航路都相同。Stream队形是基础的编队方案,Horizontal Spread和Vertical Stack编队方案都建立在此编队方案之上。
Stream队形

- 参数
-
- 防碰撞区域:指在两个编队群组间的空间区域,用目视来保持此空间长度,但CAOC会计划以下:
- 两个双机(2-ship)编队的间距应保持30秒差距(译注:指的是预定时间表上每个点到达时间相差30秒)
- 在两个三/四机编队间的间隔应保持1分钟差距
- 编队区域:对于IMC(仪表气象条件)或夜间情况下,飞机横向间距应保持最少2海里,前后距离应保持相对航路点20秒的时间差。对于VMC(目视气象条件)下,请使用目视参照来维持足够的空间距离。
- 防碰撞区域:指在两个编队群组间的空间区域,用目视来保持此空间长度,但CAOC会计划以下:
- 规划要素
-
- 速度:一般的,计划巡航速度应不大于stream编队中速度最慢的飞机(详见附录 3-4-A)。除非另有说明,否则应使用以下速度标准:
- 在从第一个TRP点开始飞向RSP点时,地速应为420kts。
- 在高威胁区域时,地速应为480kts。
- 在穿越高威胁区后,为了节省燃油,地速应降为450kts。
- 速度:一般的,计划巡航速度应不大于stream编队中速度最慢的飞机(详见附录 3-4-A)。除非另有说明,否则应使用以下速度标准:
- 高度:
-
- 如果合适,将为 ATO 中的每个飞机编队分配高度/飞行高度。所有飞机将使用共同的参考气压设置(QNH 或 1013 mb/29.92英寸汞柱)。
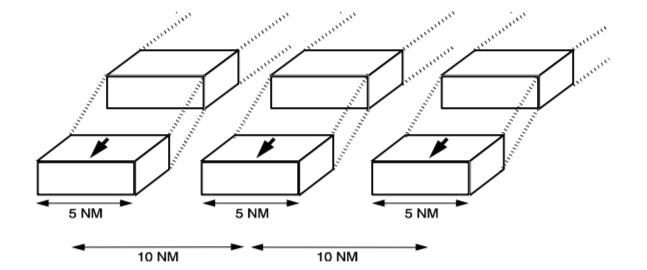
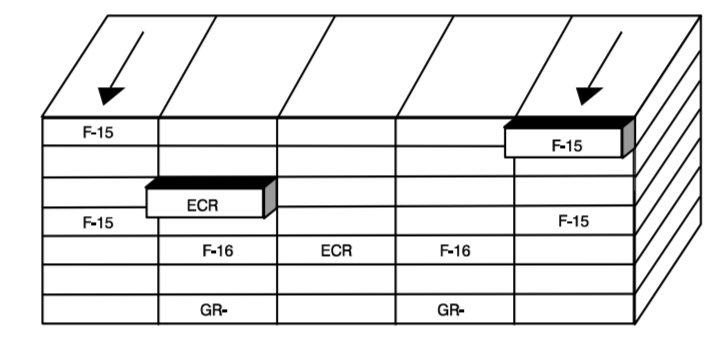
Horizontal Spread队形 (FM-2)
Horizontal Spread队形方案是指以两组或以上的“Stream”编队并排飞行,此方案可以让更多的飞机同时穿越地方空域。但是,在方案实施时,所有编队群组所组成的机群所需要的几何空间越大,那么就代表需要更多的SEAD资产来支援Package。一般情况下,每个Stream航道的宽度为5海里,两条Stream航道间的距离为10海里,以便在面对威胁时可以留够足够的横向机动空间。航道的数量、宽度以及航道的间距这三个参数需要进行折衷性质的取舍,这是因为在采用此方案时,需要同时满足编组间/编组内飞机能够相互支援,还要尽可能的降低对SEAD资产的需求量,另一方面,规划者还要让每组Stream编队能够得到尽可能大的横向移动空间。
- 规划要素
-
- 整个Vertical Stack的总体航线由空中任务指令(ATO)指定
- 每条航道都会指定一个高度层
- 优势
-
- 可以很容易的在短时间内同时对大型目标群发起攻击,从而对敌方防御造成饱和
- 对于敌方防空来说,他们很难对我方机群进行sort(分配目标)、target(索敌)和engage(交战)
- 大型Package群组可以在很窄的高度层中进行推进(特别适合在云层间进行编队)
- 兼容不同速度的飞机,比如:让慢速战机位于一个Stream编队中(如:A-10、Alpha Jet),再让速度相对较快的战机位于另一组Stream编队中
Horizontal Spread方案示例

- 缺点
-
- 需要相当大的横向空间
- 可能需要大量的SEAD资产支援
- 难以/几乎不可能让Stream航道(同时)进行横向机动
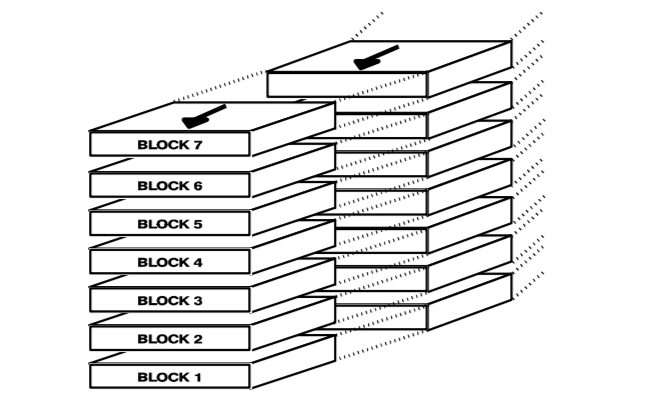
Vertical Stack队形(FM-3)
Vertical Stack(以高度层堆叠)队形是一种利用高度层来消除Stream群组间的冲突的方案。与“Horizontal Spread”相同,此队形可以让大量的战机同时穿越敌方空域。不同的是,Vertical Stack可最大限度地减少Stream群组间的间隔,从而让两个或更多个Package/子Package复用同一个SEAD空中走廊。此队形方案需要特殊的空中走廊。ATO将会指定每个编队Package使用的航线和高度层(见下表)。
| Stream群组 | 高度层 |
|---|---|
| Block 1A | 地面 到 500ft AGL |
| Block 1B | 1000 到 1500 ft AGL |
| Block 1C | 2000 到 2500 ft AGL |
| Block 1D | 3000 到 3500 ft AGL |
| Block 2A | 4000 到 4500 ft MSL |
| Block 2B | 5000 到 5500 ft MSL |
| Block 2C | 6000 到 6500 ft MSL |
| Block 2D | 7000 到 7500 ft MSL |
| Block 3A | 8000 到 8500 ft MSL |
| Block 3B | 9000 到 9500 ft MSL |
| Block 3C | 10000 到 10500 ft MSL |
| Block 3D | 11000 到 11500 ft MSL |
| Block 4A | 12000 到 12500 ft MSL |
| Block 4B | 13000 到 13500 ft MSL |
| Block 4C | 14000 到 14500 ft MSL |
| Block 4D | 15000 到 15500 ft MSL |
| Block 5A | 16000 到 16500 ft MSL |
| Block 5B | 17000 到 17500 ft MSL |
| Block 5C | 18000 到 18500 ft MSL |
| Block 5D | 19000 到 19500 ft MSL |
| Block 6A | 20000 到 20500 ft MSL |
| Block 6B | 21000 到 21500 ft MSL |
| Block 6C | 22000 到 22500 ft MSL |
| Block 6D | 23500 到 24000 ft MSL |
| Block 7A | 25000 到 27000 ft MSL |
| Block 7B | 28000 到 30000 ft MSL |
| Block 7C | 31000 到 33000 ft MSL |
| Block 7D | 34000 到 36000 ft MSL |
| 备注:依据任务区域的地形高度,Block 2,3或4的高度层可能无法与Block 1的高度层结合使用,因为Block 1的高度层是以任务区域的地形高度作为参考,而其他Block的高度是以MSL为基准。 | |
- 优点
-
- Vertical Stack队形可以方便的在短时间内让大规模机群使用较窄的空中走廊来推进到任务区
- SEAD资产能更好的被利用
- 部分飞机可以在其最佳的巡航高度层中飞行,以获得最大航程
- 每个Stream编队的横向机动空间更大
- 对于敌方战机来说,进行目标分配(sort)更困难
- 缺点
-
- 高空飞行的Package可能会暴露整个机群的位置
- 强迎风/顺风可能会导致整体的Vertical Stack队形保持困难
- 可能对SEAD资产的依赖度更高
Vertical Stack队形示例

Wall队形(FM-4)
Wall队形中,每个任务编队群组都按指定的独立航道和高度层穿越敌方空域。ATO将指定Wall队形的中心航路,并为每个编队群组分配单独的航道。每条航道的航线都与Wall队形的中心航路平行。如果Wall编队不符合当前的空域控制(ACO)程序,则需要特殊空中走廊来执行此队形方案。Wall需要足够多的SEAD资产来进行支援。
- 参数
- 除非另有规定,Wall默认的每条航道的宽度为5NM,高度层的默认分配方式与Vertical Stack(FM-3)的分配方式相同。
Wall队形示例

- 优点
-
- 可以饱和敌方防空
- 为提供最大限度的保护,可将HVAA或非对空战机置于Wall队形的中间位置
- 缺点
-
- 横向机动更困难
- SEAD支援变的及其重要
- 并非最佳的穿越FLOT(前线)方案
- 需要在 CAOC 和联队一级进行大量协调。
撤离方案
目视气象条件下的低威胁环境
在VMC的低威胁环境下,Package一般不会在撤离时重组编队。在完成打击后,Package将执行脱离攻击路线(Off Attack Flow, OAF)程序(详见本章目标区域战术/程序),直至离开OAF圈。在离开OAF圈后,Package将前往撤离路线点 (ERP),与大部队(译注:原文中此处单词为National formation)会合,并以最短路线返回。这种撤离方法易于规划,允许一定的路线自由度,但是Package内部冲突的解消是完全依赖于Package内部成员的目视接触。
高威胁环境/仪表气象条件
为了在IMC条件下消除友机冲突、进行相互支援或利用支援资产穿越高威胁区域时,Package可能需要在撤离时重组编队。在这种情况下,ERP将是一个共同的时间参考点,在ERP航路点时,整个Packge将会重新组成编队,以便一起通过撤离航路来完成脱离。CAOC部门将会在ATO中指定ERP点位置和撤离路径、
规划要素
- ERP航路点至少应距离目标16海里(以480海里的地速抵达ERP航路点的所需时间为2分钟)
- 在ATO中,每个编队都会被指定一个到达ERP航路点的时间(有时会附带指定高度)
- 最后一个撤离的飞机应在完成撤离时向支援部队通报撤离完成
威胁反制
迫切威胁
对迫切威胁的反制一般是让formation中的element来执行。执行反制的飞机应尽快的回到编队中的位置,但是不可对友机造成冲突或让友机误以为遭到威胁。在加入时,可以考虑使用一些方法来让编队知晓飞机正在重回编队这一事情(如使用无线电、视觉信号)。在目视气象条件(VMC)下,若尝试重新加入编队的飞机无法回到原先位于编队中的位置,则此机应尝试加入编队的尾部,Package指挥官或COMAO协调员应在此预留位置。
远距离威胁
有时可能需要让整个编队偏离(kick)航线以避开前方的重大威胁。通常,编队的偏离权限应给予Package指挥官和护航部队的指挥官。被授权偏航的编队的机组成员必须具备良好的空中态势感知能力,并充分了解偏离计划航线对编队的影响。如果出于战术原因,编队指挥官位于编队中央,则他应指派前方编队的指挥官为副指挥官,并将偏航权限授予给他。同样,护航部队中执行sweep任务的编队的指挥官应处于最佳站位上,以便发出偏航指令。在所有情况下,执行偏航命令时,应通过特定的单词代号(codeword)予以确认。此外,编队在偏离预定航线时必须通知护航部队的指挥官,以便让护航编队能无缝的继续提供支援。
无法遵守TOT时间时
不能按预期计划进入 TOT 窗口的飞机决不能危及其他Pakcage成员的攻击部署,而应考虑采取以下行动之一:
- 使用预先制定的另一套TOT进行攻击部署
- 打击备选目标或者放弃目标
- 完全放弃攻击计划,转而对随遇目标发起攻击(需得到授权)
靶眼
靶眼程序应作为威胁通报的参考系。靶眼的协调应在ATO中进行明细
总结
| 方案 | 代码 |
|---|---|
| 低空 | PR-1 |
| 中空 | PR-2 |
| 高-低-高 | PR-3 |
| 高-低-低 | PR-4 |
| 方案 | 代码 |
|---|---|
| Stream | FM-1 |
| Horizontal Spread | FM-2 |
| Vertical Stack | FM-3 |
| Wall | FM-4 |
目标区域战术/程序
攻击协调
任务初期、COMAO协调员将会进行任务计划并协调。Pakcage领队将使用ATO中的电话列表来和其他成员对任务细节进一步的协调和计划
武器
ATO将会分配摧毁、瓦解、干扰目标的任务。并将DMPI分配给各中队。通常情况下,就 FP 而言,武器的选择将由 package负责人(根据整体任务负责人的建议)决定,在ATO中,应标明 “现有可用最佳”的武器。但是,如果存在高价值武器(如MW-1或JP-233)或武器的选择适用限制性标准,则是直接由CAOC在ATO中指定这些武器(而不是Pakcage负责人各自选择)。
发起后续攻击
由于第一轮的攻击会惊扰防空火炮(AAA)和其他的防御系统,因此一般情况下不建议对目标发起第二轮的攻击,也不会建议再次飞跃目标。但是,如果第一次对高优先度目标的打击失败,则可能需要重新发起攻击。在需要重新攻击时,此时应在ATO中进行写明计划,并提供备选TOT时间。
TOT规划要素
飞机必须在他到达TOT时间后的10秒内对目标发起攻击。为了避免飞机被爆炸碎片波及,规模为4机(4-ship)的群组在目视气象条件下的最小TOT窗口时间为1分钟,在仪表气象条件下最小的TOT窗口时间为2分钟。如果仅通过协调TOT时间的手段来防止破片波及,那么4机规模的群组不论是在仪表气象条件还是目视气象条件下的最小TOT窗口时间都为2分钟。在任何情况下,多组编队持续对一个目标集群进行打击(如机场)时,每个编组间的TOT间隔应至少留足1分钟的缓冲时间。在仪表气象条件下,规模为多组4机编队时,编队间的的最小TOT时间差为40秒(即第一和第二编队的每架飞机同时攻击相距至少 3,000 英尺的不同 DMPI,第二编队的TOT相对往后延迟40秒)。
备用TOT计划
备用TOT(ALT TOT)计划只会在需要攻击高价值目标时制定。ALT TOT的窗口时间一般是在正常TOT计划的窗口结束时间作为其起始时间。但是,当打算在攻击序列结束时使用区域拒止武器时,则应考虑在备用TOT窗口期允许后续对目标攻击的行为所带来的影响。
攻击序列
以下是常规目标和常规武器的要素信息,此信息有助于COMAO协调员或Package领队规划战机打击目标的顺序:
MW-1(STABO)/BAP 100/Durandal
MW-1(STABO)、BAP-100和DURANDAL是为特定目的而设计的武器,这些武器只能通过限制性的甚至是有瑕疵的投放参数进行使用。这种固有的不灵活性决定了这类武器通常是在攻击序列中首先被用于投放。
威胁系统
尽早成功地攻击并摧毁 AAA 和防空导弹防御点,将提高后续飞机的生存能力。
精确制导弹药(PGM)
想要成功投送PGM(译注:如激光制导炸弹和AGM-65激光制导版本)需要保证飞机和目标间没有其他物体阻挡视线。因此,在投送时需要考虑其他攻击者投送武器所造成的烟雾和爆炸对引导精度的影响。
可造成二次伤害的目标
可能会产生二次爆炸的目标(化工仓库、弹药库、POL等),存在会对后续攻击打击者造成伤害或阻碍他们发起攻击的可能。
区域拒止武器
如地雷这样的区域拒止武器最好是在攻击序列结束时投放,若提前投放,则后续执行打击任务的飞机可能会无意中引爆地雷,降低拒止效果。
天气和昼夜
预报的云层基数、风速和太阳(或月亮)的位置将是影响决定使用何种武器和投射方法,以及对区域目标内的 DMPIs 的攻击方向和顺序的重要因素。
打击时的防冲突计划
要想解决飞机受到打击效果的伤害,可以使用在空间上的措施/时间上的措施或两者结合的措施来实现对爆炸波及的消解。具体消除冲突的程度和方法取决于具体使用的武器类型、投掷方法以及目标区总体计划中的攻击顺序。通常情况下,COMAO协调员将会提供一个TOT间隔,让Package中的所有飞机都有足够的灵活性来单独在时间上消除冲突。然而,在计划时应尽可能的压缩TOT间隔时间,以提高战机生存能力和攻击效果。对TOT间隔时间压缩还可以让计划对同一目标进行第二轮打击时具有方案上的弹性,因为压缩后的间隔时间可以为备用TOT计划提供更大的窗口时间。以下是一些计划要素:
横向防冲突
在攻击机场等区域目标时,采取横向防冲突措施尤为合适,部署攻击时,可采取以横向散开的方式对DMPI发起攻击来实现横向防冲突。规划人员和任务负责人必须始终牢记垂直方向上的防冲突措施,如果威胁情况允许,可在短时间内向目标释放多种武器。在某些情况下,可将横向和纵向防冲突结合使用,以实现计划最佳化。
- 优点
-
- TOT间隔可以大幅度压缩
- 兵力的集中可以让敌方防御饱和
- 突袭效果最佳
- 易于规划;不需要在攻击前展开编队,也不需要在攻击后重组编队
- 任务中,可以长时间的维持飞机间的互相支援
- 可以减少支援部队在目标上空的驻留时间
- 缺点
- 可能难以快速应对来自目标区域的威胁(在不会干扰编队中其他飞机的前提下)
时间上的防冲突
时间冲突通常在以下情况下使用:当使用多架飞机打击一个点目标,或无法部署横向防冲突方案时。
- 优点
- 可以重复攻击同一DMPI。
- 缺点
-
- TOT时间增加
- 支援单位必要的驻留时间增加
- Package易受威胁
- 飞机间难以相互合作
- 不能对目标造成饱和式打击
脱离目标程序(OTP)
为消除攻击后战机间的冲突,Package必须制定一个打击后的脱离路线计划。攻击后的路线规划除了为了防止飞机间冲突、更是为了在攻击后重组编队并建立相互支援。攻击脱离路线的规划范例如下:
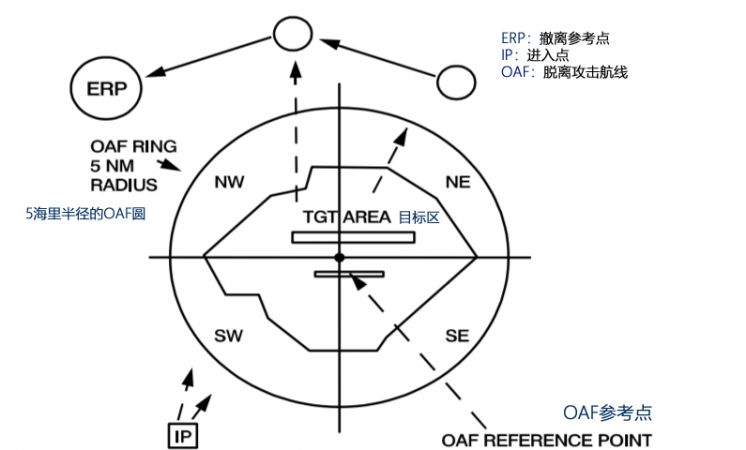
OAF规划范例

OAF规划
OAF标准平面图的基础是位于目标群组中心的一个OAF参考点、一个OAF环(以参考点为半径 5 英里)和四个扇区。以OAF参考点为中心作南北和东西两条轴线将圆形区域划分为4个相等的90度扇形区域,这些扇形区域以OAF环为界。这些扇区分别为东北 (NE)、东南 (SE)、西南 (SW) 和西北 (NW)。
OAF程序(无通讯)
当COMAO协调员认为需要在完成攻击后进行消除冲突时,他将在ATO中给出一个OAF参考点;该点的位置靠近目标群组的中心。ATO将为每个编队/飞机指定一个OAF程序扇区,例如 “OAF NE”(OAF 东北)。此外,ATO还将确定一个撤离航路点 (ERP),并为每个编队分配对应的ERP时间。在Pakcage领队和任务领队之间无法进行通信的情况下,编队应执行ATO指定的航路扇区,直到离开半径为5海里的OAF环,然后再准时前往ERP点。
OAF程序(有通讯)
与前一种情况一样,当需要消除冲突时,管制员将在ATO中详细说明OAF参考点和编队/飞机航线扇区。但是,如果Package领队和任务领队之间可以进行地面通信,则可以根据Package领队的要求修改标准OAF计划(例如,通过调整OAF参考点的位置、更改OAF环形半径和/或修改目标区域撤离扇区)。但是,对ERP的任何更改都必须征得COMAO协调员的同意,因为选择该点可能是专门为了协调支援资产,或在负责的任务不同的Package之间提供冲突消解措施。
相关文档
| |||||||||||||||||||||||||||