高价值空中资产(HVAA)保护任务
阅读
2025-09-12更新
最新编辑:退tui
阅读:
更新日期:2025-09-12
最新编辑:退tui
简介
现代空战需要制空机、攻击机和支援机间有效的相互协助。随着战斗机和攻击机资产的减少,支援机资产在投射战斗力方面变得越来越复杂和重要。这类支援机资产中的重要部分被称为高价值空中资产(High Value Airborne Assets,HVAA)。这些重要的空中资产包括但不限于:北约空中早期预警系统(NAEW)E-3A,EC-130 Compass Call,控制指挥控制及其通信系统(ABCCC)和加油机。鉴于这些资产都是HVAA资产,因此它们也是敌机的首要目标。本章的目标是建立关于制空战机执行保护高价值目标任务的通用理论框架和参考。在允许的情况下,本手册第1章(战机目标责任区)所述的流程、条令和准则将适用于本章。
任务目标
- 保证 HVAA 在执行任务/就位期间以及战术撤退期间的存活。
- 探测,识别和打击所有来犯的敌机(注意:来犯敌机指的是对空中高价值目标以及保护HVAA的制空战机有威胁的敌机)
威胁
本文章只讨论HVAA资产已经起飞并开始执行任务时遇到威胁的状况。我们假定有存在区域性/有机(organic)的空中资产在基地及其周围的空域保护HVAA资产。因此,HVAA所面对的威胁来自空中和地面(地对空导弹)。我们假设所有敌机的目标是摧毁HVAA资产或迫使其在特定时间段内离开任务。
敌机
敌机威胁包括具有全向(all-aspect)探测能力并搭载致命火力的制空战机。可遇到的威胁可能包括如下特点:
- 所有高度:
- 敌机可能从所有的高度(从低空到极端高空)发起攻击。低空攻击的特点是威胁进入低空时,其机载雷达可能处于待机/关闭状态,待飞行到特定地点后会执行爬升,并以短距离锁定HVAA资产实施攻击。而对于敌机从高空以高速发起攻击的场景来说,HVAA资产同样面临着极大的被击落的风险,这是因为来袭敌机的武器WEZ范围可能很大,保护HVAA的制空战机所可用的反应时间将会被缩短,此时执行拦截敌机任务的制空战机的编队也至关重要。高空攻击的特点是敌机会在超过60,000ft的高空以2.0马赫的速度来袭,并在很远的距离就发起攻击(发射导弹)。
- 大型威胁包:
- 敌方为了提高对HVAA打击的成功率,可能会组织一个大规模的打击群来让保护HVAA的防守方任务饱和。
- 诱饵/欺骗战术:
- 敌方战机可能会使用诱饵战术来引开专职保护 HVAA 资产的制空战机。敌方战机也可能会采用欺骗战术来掩盖真正的攻击者和/或其攻击轴心。这类攻击的一个典型例子是将攻击 HVAA 的飞机隐藏在空对地 (A/G) 攻击组中。
地对空威胁
敌方的地对空威胁包括先进的长程防空系统
假设条件
本章节所介绍的流程及其战术是基于以下的假设条件:
- 最可能需要提供HVAA保护的高价值资产是E-3或E-8
- 在威胁来犯前,HVAA资产可能在其ROZ(任务限制区)内以随机路线进行飞行,HVAA并不一定要在ROZ中以确定的路径进行飞行
- 当受到威胁时,HVAA 将后撤(重新定位或后退)
- 保护HVAA的制空战机不受空域限制,可自由的执行战术和释放导弹
- 在制空战机进行BVR交战时需要执行主动式敌我识别
HVAA任务
- 在特定环境下,任何的空中单位几乎都会被视为空中高价值资产,但由于E-3、RC-135、E-8C、加油机、EC-130 和 EA-6B等飞机在战役中所扮演角色的重要性,这些空中资产都需要制空战机进行专门的保护。
- 在紧急任务开始之初,由于能快速就位的空中资产很少,最有效的保护HVAA资产的办法就是让其在限制的固定轨道上来回盘旋。
- 要使HVAA资产充分发挥其作用,通常需要更灵活地决定HVAA资产的飞行路径或盘旋轨道。例如,为了优化其效能,E-3 将根据以下因素规划其盘旋轨道:
- 能够监控到需要的雷达覆盖范围
- 考虑地理因素对雷达覆盖的影响
- 条令的制约
- 根据内部和外部威胁评估、任务优先级和可用于保护HVAA的制空资产来确定的 "风险等级"
- 现行的空域控制措施
- 现存的FAOR区域和MEZ(导弹交战区)
- 根据以往经验,想要最优化飞行任务的效果,需要一个大小80-100海里的ROZ中的随机盘旋轨道
- 一些HVAA资产如:电子支援措施(Electronic Support Measures,ESM)/电子情报(Electronic Intelligence,ELINT)平台需要更多的灵活性来保证合适的工作覆盖方位,在实际中这些高价值单位可能需要穿越整个前沿战区(FEBA)
- 加油机通常在相对较小的固定轨道上盘旋
- 在一场大型空中行动中,可能会需要用到众多的HVAA资产在广阔的空域中执行任务。同时,战役中还存在保护地面资产和设施的任务需求。下图为一张示意图,演示了多HVAA资产配合提供不同功能的场景。下面的讨论是关于HVAA资产在相对受限和可预测的区域或明确界定的ROZ内执行任务的场景。如果 HVAA 的任务要求其在与FEBA(前沿战区)平行的区域内长时间穿梭,或在宽广空域内随机飞行,则应首选BACAP(阻滞性战斗巡逻任务)或Sweep(扫荡任务)/Escort(护送任务)(有关这些任务类型的进一步讨论,请参阅第 1(战机目标责任区)、2(混编战机任务) 章节或第 6 章节)。
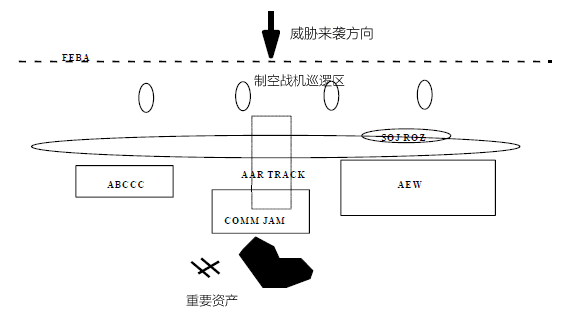
多HVAA资产合作场景

任务规划的考虑要素
HVAA资产可以是被友军地对空导弹系统保护、也可以是被专门的制空战机保护或者是被执行FAOR或指定防御区任务的制空战机保护。制空战机要考虑到的一点是,HVAA资产可能会需要进入到导弹交战区(MEZ)中执行任务,或者是在威胁来袭时撤出导弹交战区(MEZ)。因为制空战机数量有限的关系,不是所有的高价值空中资产都可以配备专门的制空战机进行保护。要决定什么HVAA资产需要专门的战机进行保护,以下的HVAA因素和相关问题必须得到落实:
- HVAA在岗位置与威胁位置的关系:此位置离威胁有多近?如果威胁出现,是否有可用资产来应对威胁?威胁位于哪个任务区块中?
- HVAA在岗时间有多久(Time-On-Station)? HVAA的任务可预测性如何?在HVAA在岗的时候,在岗时间段会不会长到让敌方有充足的时间计划并发起攻击?
- 威胁:威胁具体是什么?其性能如何?
- 附属保护措施:是否存在其他的友军资产在保护HVAA(如:地对空导弹系统,在FAOR区域执行巡逻的友军制空战机 等)
- 脆弱性:对 HVAA 脆弱性的总体评估是什么?
- 可被索敌性和可被侦测性:敌军能在我方HVAA在岗且运作时探测到HVAA并定位其位置吗?如果HVAA被定位,敌军是否可以有效的对我方HVAA进行索敌?
- 防御性:在配备专门的制空战机时,战机能否在不改变或限制HVAA飞行路径以至于降低其任务有效性的前提下,有效地保卫 HVAA?
通常情况下,对这些因素和问题进行分析后会发现,在制空战机资产有限的情况下,E-3 和 E-8C JSTARS 配备专用制空战斗机进行守卫的可能性最大(见下表)。然而,最终的定夺应基于上述七个因素、总体形势和指挥官的意愿。
| HVAA | 在岗位置注1 | 在岗持续时间 | 可被探测性注2 | 可被索敌性 |
|---|---|---|---|---|
| E-3 | 100-150/25-35,000 | 8-16 | 高 | 高 |
| E-8C JSTARS | 50-100/25-35,000 | 8-16 | 高 | 高 |
| RC-135 | 50-100/20-30,000 | 8-16 | 中 | 高 |
| 加油机 | 50-150/20-30,000 | 3-5 | 中 | 中 |
EC-130 H (COMP CALL) E (ABCCC) |
40-70/15-25,000 | 5-8 | 高 | 中 |
EA-6B SOJ CIJ |
40-70/15-25,000 20-40/0-5,000 |
2-3 1-1.5 |
中到高 中到高 |
中 中 |
| U-2S | 5-150/65,000+ | 8-11 | 高 | 低到高 |
| 注意:
1:在岗位置表示为距离威胁的海里数,在岗高度单位为英尺(feet),在岗时间单位为小时 2:这些评级是相对的,是基于最坏的情况。可被探测性评级基于 HVAA 的位置、在岗时间、电磁辐射和飞机大小。可被索敌性评级基于 HVAA 的可探测性和易受攻击性。 | ||||
HVAA防御反制手段
在任务计划中,将全面考虑HVAA的防御手段,并将考虑任务的优先级、风险/威胁程度以及可用的防御资产。如果 HVAA 可能或即将受到攻击,基本的防御措施是保持或建立在敌方武器释放范围之外的位置。以下程序描述了可能的 E-3 撤退方案(其他HVAA也可借鉴)。
- 战术重定位(Tactical Repositioning)
- 如果E-3机组提前收到了潜在威胁警告,他们可能会调整盘旋位置,以便更好地探测对E-3造成威胁的敌对单位。在重定位后,HVAA机组应能继续执行任务,新位置对任务执行效能只会有些许降低或完全无影响。根据战术态势,保护HVAA的空中单位可能或可能不需要跟着重定位他们的CAP区。
- 撤离(Retrograde)
- “撤离”机动是指以最快的速度让E-3远离已识别的威胁,以保证飞机能够远离敌方对空武器射程范围。撤离的目的是拉开距离,或至少将逼近率降至最小。E-3 将加速到最大速度,并在无线电中通报 "Retrograde "短语和撤离矢量,以便让制空战机知晓态势。根据战术态势,部分或全部的制空战机将会应对威胁,以最大限度地提高 HVAA 的生存能力。在 45 度或更大倾角的转弯过程中,E-3 可能会因雷达态势质量下降而降低对制空战机的管制协助。在撤离时可能同时执行进行下高机动。
- 决策
- 一般来说,E-3机组是无法确定一个决定执行撤离和战术定位的威胁距离常量。这是因为防御的决策距离取决于敌机机型、E-3的盘旋位置、我方的阵地态势与友军单位。因此,在不同的任务中防御的决策距离也不相同。要明确的一点是,E-3机组本身可以通过雷达态势自行确定执行战术重定位和撤离的时机。不过有的HVAA因为没有配备监视雷达的原因而无法自行确定防御决策距离(如:加油机、E-8C),这些HVAA资产高度依赖制空单位的支援,如制空战机的保护和预警机的态势通报。担负 HVAA 防御任务的制空战机需要考虑到受保护飞机的类型,并在必要时尽快发出适当的指令告知被保护的飞机。
兵力组成
如果需要和/或希望有专门的制空战机来协助防御,则应适用以下准则(注:MFFO的兵力组成段落所罗列的考虑因素也适用此任务):
- 最佳战术要求纵深防御有两道防线
- 部分/所有的制空战机需要具备IFF 模式4/电子敌我识别能力
- 由具备携带 FOX-1(半主动雷达弹)/FOX-3(主动雷达弹) 能力的制空战机组成 HVAA 防御部队是最理想的选择,这也能最大化任务成功的几率。
- 在夜间/仪器气象条件(IMC)下或遇到了高空高速逼近的威胁时,只携带FOX-2(红外导弹)的制空战机因其所携带的导弹局限,其作战能力将会被大幅限制
- 执行防卫任务的飞机类型/最小战机数量取决于威胁/任务。一般情况下,护卫HVAA的制空战机为4-8架。其武器主要为FOX-1/FOX-3;只挂载FOX-2的战机是最后的候补
- 为达到最佳的小队指挥效果,任何一个执行 HVAA 保护任务的 CAP 小组最多可部署 8 架制空战机(日间目视气象条件(VMC)下)和 4 架制空战机(夜间或仪表气象条件(IMC)下)
- 制空战机应该配备外部副油箱以延长在岗时间并提高战术弹性。可用情况下,应考虑进行空中加油
- 考虑到机组疲劳,执行护卫战斗巡逻的制空战机不论是否进行空中加油其任务执行时长都不应超过4个小时
任务
通常情况下,联合空中作战中心应指派制空战机执行HVAA保护任务。你可通过以下两种情形来决定护卫HVAA的制空战机的任务内容。如果态势和情报能力允许,联合空中作战中心可调用部分或全部专门的地面待命战机紧急起飞,以应对特定的威胁。如果态势和情报能力不允许,则联合空中作战中心应指派 制空战机执行 HVAA 护卫战斗空中巡逻(CAP)任务。
通联
第一章中目视信号中叙述的通讯程序和视觉信号同样适用于本任务(注:第一章中FAOR在本章中应改为 HVAA 保护战斗巡逻区)。如果可能,HVAA应监听主要的UHF空中战斗巡逻频率。在空中存在多种类型的HVAA时,应建立UHF/HF HVAA管制网,并与空中指挥与控制单位的管制员相连。
目标信息
第一章中目标信息章节适用于本任务,除非标准靶眼点是HVAA执勤位置/盘旋轨道中心点
指挥与控制
应指定一名总体作战指挥员,该指挥员应是对战术态势最了解的人;指挥员通常是来自 TACON(战术控制)机构(如ASACS(空中指挥与控制)管制员、CRC(控制与汇报中心) 管制员)。如果 TACON 机构对态势的感知能力下降,则应由 CAP(MFFO)领队承担任务管理职责(如果可以的话)。任务指挥员负责以下工作:
- HVAA护卫CAP的位置
- 基于可用飞机数量、飞机性能、空中加油可用性、飞机执勤时间和整体战术规划来管理CAP任务
- 制空战机的交战决定
- 指引HVAA资产进行战术撤退
CAP(空中战斗巡逻)
CAP任务参数和布置的位置的落实只是起始的参考,任务管理者可以与CAP/MFFO领队进行协调,更具态势和/或条件的需要进行修改
任务参数
制空战机的标准HVAA护卫CAP参数如下:
- 15海里的CAP跑马道长度
- 逆时针转向,在冷航段左转来转入热航段以朝向威胁方向
- 空速应为0.8马赫(注意:位于较高的高度加上最大的燃料载量时,可能需要更高的速度来维持飞机机动性)
- 热航段高度必须在15,000英尺MSL或以上
- 为了消除在目视气象条件下潜在的小队冲突,CAP冷航段的高度必须和热航段高度有+/- 1000英尺的高度差。在夜间/仪表气象条件下,每个制空战机或制空战机小组(双机)必须维持一个特定的高度层
编队
在目视气象条件下,CAP编队可以依据第二章中的编队部分建立队形。在 IMC/夜间期间,HVAA CAP 应由element或flight执行。如果天气条件要求单机(single-ship)行动,那么制空战机应在保持特定高度层的情况下进行尾随编队飞行。手册的具体指导原则和领队的意愿将决定具体的编队方式。
CAP位置可选项
纵深防御的理念要求有两道CAP防线,即前方CAP防线和后方CAP防线。
- 前方CAP需布置于HVAA执勤点/盘旋轨道中心开外45海里处,其巡逻方向为预计的威胁来袭方向(见下面两个示例图)。这个距离可以让制空战机有时间和空间在HVAA被迫撤退时与相关威胁进行交战。如果前方CAP位置离HVAA太远,这可能会导致前方CAP战机与无关威胁进行交战的可能性增加。如果前方CAP的位置离HVAA太近,那么敌机完全可以在与护卫机交战前迫使HVAA脱离其工作区域。如果制空战机拥有两个前方CAP跑马道,那么这两个跑马道必须左右分开。具体的左右分开将取决于态势和任务管理者/CAP/MFFO领队的意愿。在确定最佳的前方 CAP 布置方案时,CAP 领队必须考虑到当前态势、战术、威胁、威胁方向、可用的制空战机数量以及以下因素。(注:两种方案均假设制空战机数量不变):
- 单一前方CAP跑马道 - 优点
- 制空战机兵力更集中
- 更好相互协助
- 敌机更难将我方所有战机都作为目标分配给他的队员
- 单一前方CAP跑马道 - 缺点
- 制空战机可以选择的战术更少
- 制空战机能处理的威胁面更小
- 双CAP跑马道 - 优点
- 拓宽了可处理的威胁面
- 制空战机拥有更多的战术可供选择
- 双CAP跑马道 - 缺点
- 敌机更容易分配他们的目标
- CAP跑马道间的协调(Co-ordination)更难
- CAP跑马道间的相互支援(Mutual support)更难完成
- 单一前方CAP跑马道 - 优点
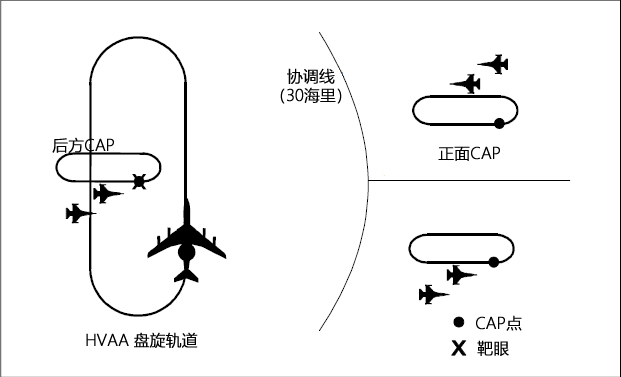
前方双CAP跑马道
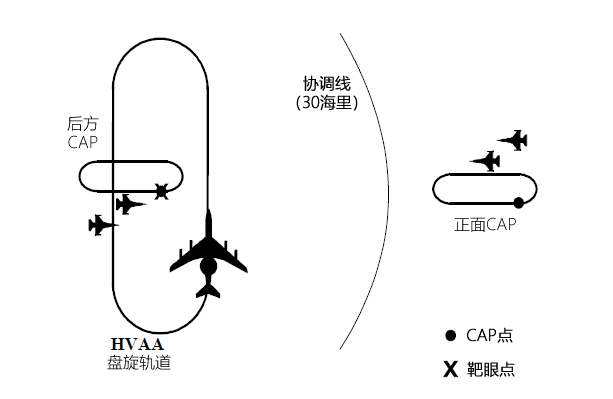
前方单CAP跑马道


- 后方CAP的初始位置应放在HVAA的执勤点/盘旋轨道的中心点,方向朝向预期威胁来袭方向(见上图)(注意:如果 HVAA 是 AEW,作战指挥官可能会将 CAP 移至雷达盲区之外的位置)。HVAA在轨道上的位置、制空战机的态势感知以及威胁状态会促使后方CAP改变自身位置。如果HVAA仍然在其盘旋轨道中心点20海里范围内,则后方CAP应保持自己的执勤位置直到与威胁进行交战。如果HVAA未保持在盘旋轨道中心点20海里范围内,则后方CAP应继续维持执勤位或脱离位置对HVAA进行护航,直至与威胁交战。这一决策需基于战术态势、制空战机的能力、空中指挥与控制单位的可用性/能力以及任务作战指挥员/MFFO/CAP 领队的期望。考虑因素概述如下:
- 后方CAP在执勤位巡逻:
- 相比脱离位置进行HVAA护航,在执勤位上制空战机拥有更好的战术态势感知,这是因为制空战机的雷达总能扫描到预期威胁来袭方向
- 当HVAA位于盘旋轨道的极点时,后方CAP战机可能难以防卫忽然出现的威胁
- 后方CAP脱离位置对HVAA进行护航:
- 更容易对付忽然出现的威胁
- 制空战机对战术态势的感知会下降,这是因为此时战机雷达无法朝向预期威胁来袭方向进行扫描。此时后方CAP的制空战机更依赖前方CAP和/或空中指挥与控制单位的战术态势通报。
- HVAA可能会需要在FEBA(战线)或国境线附近执行任务。其他政治限制因素可能不允许制空战机在 HVAA 盘旋轨道前方进行CAP巡逻。在这种CAP被限制的时候,仍然有两种CAP布置方案可选,如下图所示。
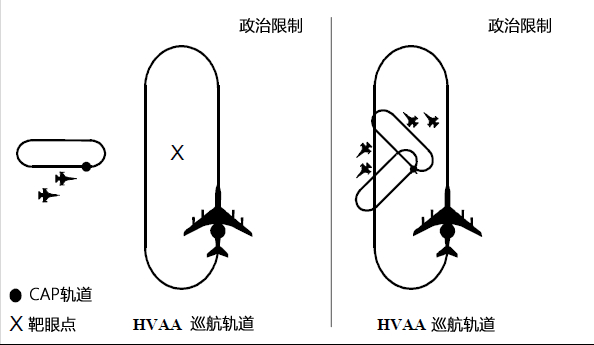
受限制时的CAP部署方案

CAP配置选项
CAP配置选项可参照第一章中CAP章节的内容
呼号
- 不使用分立的CAP频率时,执行HVAA CAP的制空战机应使用标准的制空呼号
- 当使用分立式CAP频率时,制空战机将使用IDM Colour呼号,Red 1-4,Blue 1-4和Black 1-4。战指挥员将分配这些呼号给制空战机,这些呼号在执行CAP任务时将生效
协调线(Co-ordination Lines)
为了最大限度地减少敌我识别问题和防止执行CAP任务飞机间的误击,应执行上图所示的协调线。前方CAP与后方CAP之间的第一条协调线是距离HVAA盘旋轨道/中心点30海里的弧线。如果前方存在两个CAP跑马道,则两个CAP区域间将存在第二条协调线。这条协调线位于两个前方CAP区域间的中间位置,该线起始点为第一条30海里协调线开始,向预期威胁方向延伸。在穿越协调线之前,制空战机应与 HVAA CAP 管制员和/或驻守该区域的其他制空战机进行协调。如果无法协调,除非必须为了保护HVAA而穿越协调线,否则制空战机不应越过此线。
CAP战机配备考虑因素
理想情况下,所有的HVAA护卫CAP任务均由配备Fox-1和/或Fox-3的脉冲多普勒雷达制空战机负责。但由于具备BVR/脉冲多普勒的飞机有限,这些资产不是总可用。因此,具备BVR/脉冲多普勒能力的制空战机的部署对成功完成任务目标至关重要。在确定能力最强的制空战机位置时,作战指挥员必须与 MFFO/CAP 领队进行协调,将态势、威胁和制空战机的能力考虑在内。
Fox-1/Fox-3制空战机部署于前方CAP区
在大多数情况下,首选方案是将所有具备Fox-1/Fox-3发射能力的制空战机部署在前方CAP区,将只具备 FOX-2 发射能力的制空战机部署在后方CAP区。该方案将装备较好的战机作为第一道防线。FOX-1/FOX-3 制空战机能够有机会在离HVAA盘旋区更远的地方与敌机交战。这可以让HVAA有更长的时间驻留在战区和执行任务。其次,在对付超高空和高速类型的威胁时,协调线的冲突也会减少。相反,FOX-1/FOX-3 制空战机可能会减少在岗时间,因为它们可能会对非相关(non-factor)威胁和/或诱饵进行交战。此CAP方案的优劣总结如下:
- 优点:
- 装备更好的制空战机能够位于第一防线
- 可以在第一时间与高空高速威胁进行交战
- HVAA资产可以维持更长的驻留时间和/或任务执行时间
- 减少BVR冲突和前后CAP间发生友军误击的可能性
- 缺点:
- 具备Fox-1/Fox-3发射能力的制空战机的驻留时间可能会缩短
- 敌方诱饵部队可能对我方高性能战机的影响更大
Fox-1/Fox-3制空战机部署于后方CAP区
作战指挥员可将所有具备 FOX-1/FOX-3 发射能力的制空战机分配到后方CAP区,将具备 FOX-2 发射能力的制空分配前方CAP区。此配置适用于具备BVR能力的战机不足的情况下使用。如果敌方战机越过了前方CAP区,装备较好的制空战机将作为最后一道防线与之交战。其次,此配置下具备BVR能力的战机可以维持更长时间的CAP驻留时间,因为它们将会减少对诱饵部队和非相关威胁的交战。相反,FOX-1/FOX-3 制空战斗机可能需要穿过并进入前方CAP区,以对付具备 FOX-1 发射能力的威胁。如果敌方出动单架或多架的高空高速飞机,就肯定会出现这种情况。值得注意的是,仅装备红外导弹的反坦克战斗机在应对高空快速威胁方面的武器能力极其有限,甚至几乎不存在。要注意的一点是,只具备红外弹发射能力的制空战机在应对高空高速威胁时其交战能力极其有限,甚至几乎不存在。其次,在此种方案中,HVAA资产可能会更早的被迫中止任务,因为交战很可能会发生在更靠近HVAA资产的执勤点/盘旋轨道的地方。以下为具备bvr能力的战机部署在后方的优劣势总结:
- 优点:
- 装备更好的制空战机为最后一道防线
- 敌军诱饵部队对我方大部分制空战机的影响更小
- 具备Fox-1/Fox-3发射能力的制空战机能有更多的时间做出反应、部署战术和发射导弹
- 装备相对更好的战机可以维持更长的滞空时间
- 缺点:
- 更容易在前方CAP和后方CAP间发生BVR冲突和误击
- 具备Fox-1/Fox-3发射能力的制空战机(位于后方CAP区)可能需要去到前方CAP区域来进行交战
- HVAA资产可能会更早的撤退
MFFO/CAP领队
如果负责HVAA护卫任务的机组包括多种类型的战机,则第二章中关于MFFO领队的确定方法将适用于HVAA保护任务
雷达搜索
在第二章(MFFO)中关于雷达搜索的方式适用于本篇内容
拦截
决定拦截(commit)
- 战指挥员在做出交战决定时必须权衡战术态势和威胁。如果已知敌机(bandit)的数量,那么至少应派遣同等数量的制空战机进行交战,剩余的制空战机应维持CAP巡逻位置。如果威胁数未知,则作战指挥员应考虑只保留部分制空战机,让机组中大部分飞机都参与交战
- 当战机开始交战时,先前提到的协调线流程则会生效
- CAP领队/C2管制员需要指挥制空战机建立距离HVAA资产盘旋处60-80海里的范围的DEZ(期望交战区)。交战时HVAA可能会进行撤离。而这个距离的设置有助于制空战机在充裕的时间内建立态势感知,也能在充裕的时间/距离内部署期望战术(见下图)
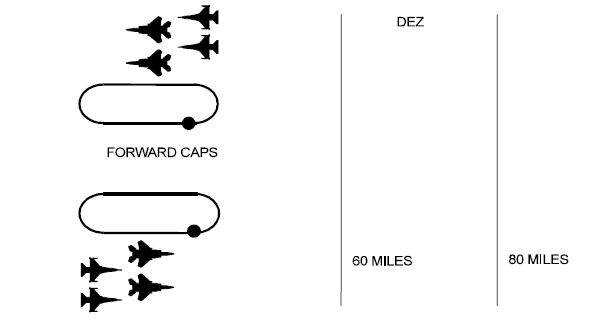
期望交战区

队形
在前段中关于编队部分的指引适用于单个HVAA保护任务中的编队配置
索敌(targeting)与目标分配(sorting)
此段内容是建立在基础的索敌和分配指引内容之上。在拦截过程中,战机需要使用机载航电和由指挥与控制单位提供的信息来建立对将会威胁到HVAA/制空战机的敌机的态势感知。当威胁接近到 80-100 NM 范围内时,制空战机应锁定高空高速威胁,并在战术上可行的情况下尽早分配目标/锁定威胁。
拦截方案
在决定进行交战后,MFFO/CAP领队需要考虑三种基本的拦截方案。根据交战决定,整个制空战机部队或是单个CAP组都可以使用这三种基础方案。在MFFO章节中我们已经讨论了前两种拦截方案(包夹与单边偏置)。MFFO/CAP领队必须考虑在面对高空高速威胁时使用第三种方案,此方案只有制空战机与威胁为高方位角(即完全迎头飞行)才能有效实现。可以这么说,战机/任务管制员必须在任务开始时就控制拦截几何关系,以满足执行拦截方案的条件。高方位角将能大大提高拦截效率,每架战机都有充裕的时间和距离来管理自身能量,这对武器的成功率至关重要。手册中规定的拦截标准将决定几何具体轮廓。此外,MFFO/CAP领队必须确定更好的攻击方案,战机组是建立纵队(trail)还是横队(wall)。如果使用纵队,若是第一架进行交战的战机未能击中敌机,后方的战机可对火力进行补充。然而,在此方案中,敌机仍然可以包抄这些制空机组,敌机仍然可能会威胁到HVAA资产。而在以横队进行交战时,则能有效的防止敌机绕过制空战机组。拦截方案的总结如下:
- 纵队:
- 单轴攻击
- 制空战机将有更多的机会去攻击敌机
- 敌机更容易逃脱拦截
- 横队:
- 多轴攻击
- 敌机更难逃离拦截
- 制空战机攻击敌机的机会相对较少
与敌机交汇(Merge)/交汇后(Post-Merge)
在MFFO中提到的和敌机交汇时的内容也适用此处,但是任务的目标是保护HVAA资产。在返回CAP区时应远离战机的进攻轴线,远离幸存的敌机,并尽可能有效的穿越平面(TL)(见下图)。我们建议在HVAA护卫任务期间,制空战机和指挥与控制的管制员将中高TL作为庇护等级。如果采用了这一建议,则必须对其进行详细介绍。此外,制空应遵守前面内容中提到的的协调线程序。

参考资料
688750169-80
| |||||||||||||||||||||||||||