附录1:支援慢速资产需考虑的因素
阅读
2024-09-26更新
最新编辑:glamcurrent
阅读:
更新日期:2024-09-26
最新编辑:glamcurrent
简介
由于受支援飞机(运输机,直升机等)的脆弱性和飞行特性,为支援慢速飞行飞机而执行的扫荡和护航任务是一种特殊的任务。这些飞机将很难逃脱可信但有限的空中威胁。在反击威胁时,制空战机可能不得不冒着更大的风险来保护慢速飞机。为了有效完成这些任务,机组人员必须修改空对空第5章:大规模兵力部署中叙述的部分战术和程序。
假设
除空对空第5章所述假设外,本附件中的程序和战术还基于以下假设:
- 存在空中威胁,但是数量非常少
- 受支援的飞机最大速度小于400节
- 制空战机将会相对受支援的飞机独自穿越FEBA(战线前沿)/FLOT(前线友军)/威胁
部队组成
为了维持element(双机,小组)的紧凑度,执行分离式护航的最小规模为4架挂载了半主动/主动导弹的战机;对于嵌入式护航,最小规模为4架携带了红外导弹的战机。对于其他战术方案可适用MFFO章节中叙述的程序。
慢速航空器任务概况/任务部署要素
需要由制空战机保护的慢速飞行器一般是运输机和直升机。这些航空器可用于战术环境的各种任务,需要包括制空战机在内的各种单位协助。这些支援任务的总结如下:
固定翼飞机
固定翼飞机(如:C-130,C-160)可用于救援和突击行动的运输任务。理想的任务高度取决于所面对的威胁,但以中高度层(10,000 - 40,000英尺间)为佳。运输机最好在夜间部署,以提高其生存能力。如果有条件,应派遣配备夜视仪的制空战机来支援。固定翼飞机能够以200节或更快的速度飞行,这增加了保护这些慢速飞行器时的战术选择。
直升机
直升机适用于执行多种类型的战术任务,包括:突击和运输任务、特种部队支援、战斗搜索救援任务等。直升机的期望部署高度非常低,这是为了获得地形遮蔽;或者飞到高于1500ft AGL的高度来远离地面轻型武装的火力。在超低空目视直升机可能极为困难,这反过来又会影响制空战机为直升机部队提供防御协助时的战术选择。制空战机的另一个限制因素是直升机的速度非常低(通常不超过 120 节)。直升机也可以大编队形式部署,编队中包括攻击直升机,且为了提高存活率,直升机喜欢在夜间执行任务。直升机突击行动的持续时间一般很长(如10到12小时),因此可能需要大量的制空战机协助。
支援单位
慢速单位的任务部署要素取决于所要面对的威胁,需要的支援单位除了制空战机外,可能还会包括执行SEAD(压制敌方防空系统)任务的战机和执行LGB或常规空对地任务的战机。需要上述支援单位协助的慢速飞行器任务如CSAR(战斗搜索与救援)任务。当需要用到上述提到的支援单位时,在执行任务前需要缜密的计划才能实现任务目标并消除友军误击风险。
战术可选项
在任务部署时,制空战机与受支援的慢速飞行前间的速度差距可能会有100 - 300节之多。这代表传统的扫荡与护航战术对于慢速飞行器的支援任务来说完全不可行。制空战机必须建立战术空速,并计算好热转弯(hot turn)和冷转弯(cold turn)的时间(译注:意思类似CAP跑马道的冷热转向点),以保证制空战机能在敌机的武器WEZ覆盖到慢速飞行器前就能在有利位置对其击杀。考虑到威胁和可用的制空单位,建议结合以下讨论的两种战术部署选项:
扫荡
此方案适用于对慢速固定翼和直升机的支援任务。制空战机需要沿着相对威胁来袭方向的计划路线飞行(见图1)。制空战机的群组间距至少为30海里。位于目标/降落区时,制空战机应转向与规划路线垂直的航向,直到与航线的垂直距离达到10海里后,转到与热段航向相反的航向返回支援路线起始点。此方案在执行前无需细致的的规划,但是必须仔细考虑制空战机在扫荡时的回转问题,以防止出现友军误击。此方案的优缺点总结如下:
优点
- 易于计划和执行,所需协调最少
- 因为不需要多次转向的关系,制空战机的战术态势感知也最好
- 可以在敌机尚未威胁到慢速航空器时就将其击杀
- 雷达不会照射到慢速航空器
缺点
- 可能难以防御两侧来袭的威胁;态势感知较依赖于空中监视与管制系统(ASACS)
- 需要大量的制空战机
- 对于到达转向点准备转向起始点的制空战机来说,易被友军击落
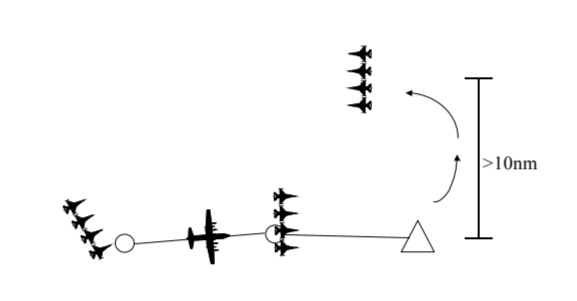
图1:扫荡任务

移动式CAP
此方案需要提前知晓威胁来袭方向,此方案同样适用于固定翼和直升机。制空战机会使用慢速航空器的飞行路线上的转向点来建立自己的CAP跑马道,其热航段(hot leg)的航向对应预期的威胁来袭方向。此方案中需要设置两个CAP组;分别位于慢速航空器当前所在航段的起点和终点。当慢速航空器到达当前航段的终点是,制空战机将会将当前CAP区沿航路移动到下一个转向点。CAP的重定位可由慢速飞行器的无线电呼叫或通过空对空塔康执行。转向点之间至少应相距30海里。优劣总结如下:
优点
- 易于规划易于执行;所需协调最少
- 执行CAP任务的飞机对慢速飞行器的位置了解程度更好
- 较低的几率照射到慢速飞行器
缺点
- 制空战机与慢速航空器之间可能需要进行双向无线电通信,以协调航线/CAP
- 依赖ASACS管制提供态势
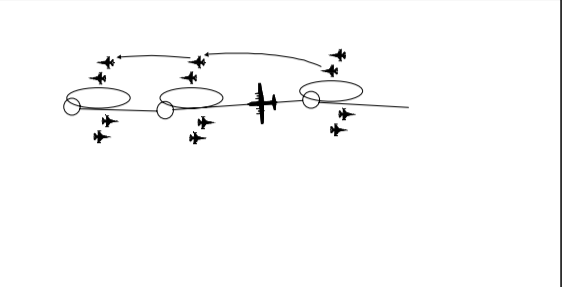
图2:移动式CAP

分离式护航
此方案需要制空战机和慢速飞行器的速度比为2:1(如:420节对210节),因此此方案只适用于支援慢速固定翼。此目的是确保制空战机位于慢速飞行器前方约2分钟的位置上,此位置可以依据威胁态势进行相应的调整。即使制空战机超前被护航的慢速飞行器大于2分钟,此种情况也被视为是分离式护航的状态。在此方案中,执行护航的战机优先选择具有半主动/主动雷达导弹发射能力的制空战机。制空战机应在超越慢速飞行器约5-7分钟后进行机动(见图3)。延迟CAP包括45秒的转向段(此时转到冷段),和30秒的CAP冷段飞行时间。2分钟的CAP结束后,制空战机需要沿着当前航向继续飞行3分钟,然后进行转向以重复之前的巡逻步骤。以此种CAP方式,制空战机和慢速飞行器之间便可维持相对稳定的距离。此方案的优劣总结如下:
优点
- 具有良好的站位,对威胁的反制具有攻击性
- 此方案可覆盖多个方向的威胁攻击轴
- 对ASACS管制员的依赖更小
缺点
- 雷达有一定概率会照射到慢速飞行器
- 制空战机机组的工作量更大。飞行员难以同时处理导航、时间点管理和雷达监视的工作
- 由于频繁的转向,燃油利用率更低
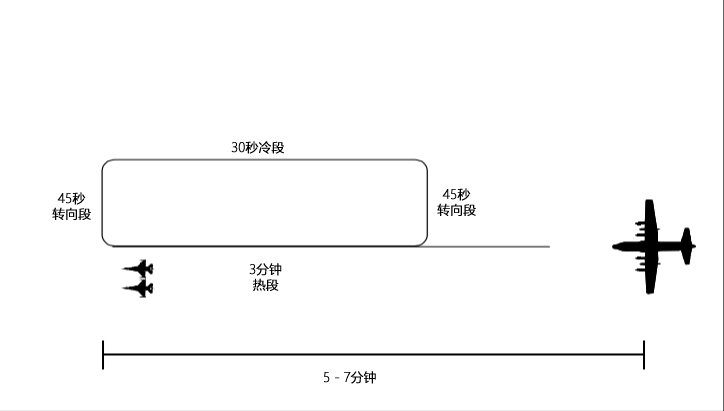
图3:分离式护航

近距离护航/嵌入式护航
此方案同样需要制空战机与被护航的慢速飞机速度差为2:1(如:420节对210节),因此此方案也只适用于慢速固定翼的护航。此方案的目标是让制空战机维持一个尽量靠近慢速飞行器的位置。此方案非常适合携带了红外导弹的制空战机。本方案中的延迟CAP与分离护航中的程序相同(见上节内容)。但是,本方案的不同点在于:制空战机在超越低速飞行器机群1分钟后执行机动,以完成延迟CAP程序。在再次由冷段(cold leg)(与慢速飞行器航向相反)转向热段(hot leg)(与慢速飞行器同航向)后,制空战机在继续飞行3分钟后,重复执行延迟CAP程序。在使用单架制空战机执行近距离护航任务时,延迟CAP程序可以直接在慢速飞行器部队的头顶或者是偏离其所在位置执行。如果制空单位数量允许,近距离护航也可以由两组护航flight来执行。第一个flight在飞跃慢速飞行器的1分钟后执行延迟CAP流程,第二个flight在飞跃慢速飞行器的2分钟后执行延迟CAP流程。此方法能保证始终存在一个fligt能朝着已知威胁来袭方向巡逻。两个flight可以分别在慢速飞行器的两侧执行自己的CAP流程,以避免与被护航的飞机的飞行路线出现交点。近距离护航可以有效的防范来自所有方向的威胁,也能够有效预防出现漏网之鱼。此方案的缺点是:由于导航和任务时间点的要求,执行近距离护航的机组工作量非常高。可使用空对空塔康来作为相对慢速飞行器的距离参考。本方案的优缺点总结如下:
优点
- 站位可以让对威胁的反制具有攻击性
- 延迟CAP程序能够监视来自多个方向上的威胁,特别是打算趁虚而入的敌机
- 两个执行CAP程序的flight间和制空战机与慢速飞行器间的无线电通讯量很少
- 能够目视到慢速飞行器
- 对ASACS的依赖较小
缺点
- 制空战机会照射到慢速飞行器
- 制空战机机组工作量高。难以同时处理导航,时间点管理和监视雷达
- 与其他的支援element的协调非常困难
- 由于转向的频繁,燃油利用率较低
- 只携带有红外导弹的制空战机应该指派于ASACS单位
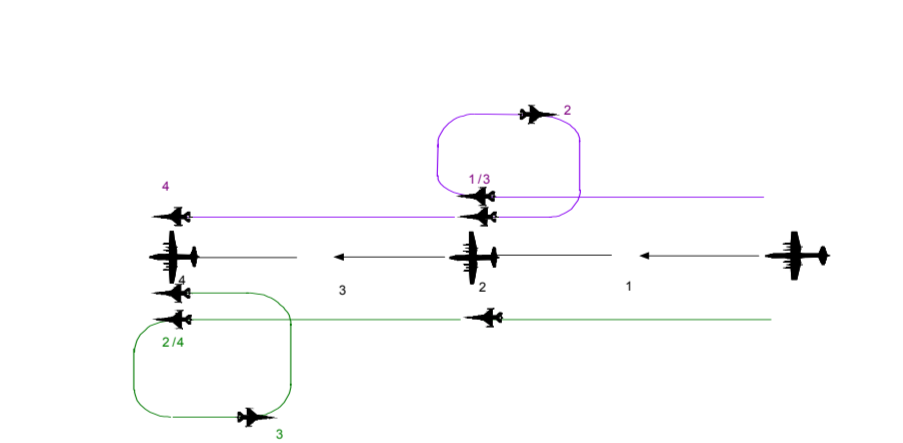
图4:近距离护航

FAOR
FAOR方案主要用于在相对较小的空域内保护直升机执行任务;不过,如有需要此方案也可以用于保护固定翼运输机。FAOR区域将会叠加与计划的直升机任务区域上(见图5)。慢速航空器部队应在同个单一轴线上进入/离开任务区。只要CAP方向选择得当,此方案可防御来自多个方向的威胁。制空战机需要尽早的和敌机交战(commit),这是由于直升机的飞行速度较慢,敌机的武器有效范围覆盖到直升机后很容易将其击落。制空战机机组需要意识到:要目视到低空飞行的直升机非常困难。想要消除高速飞行器和低速飞行器间的冲突(误击和撞机等),则必须以不同的高度层进行区分。根据受保护空域的大小,任务规划者可能需要建立一个以上的FAOR。FAOR区域的建立指南可以参考空对空第一章。此方案的优劣总结如下:
优点
- 对于移动/静止的慢速飞行器,无需考虑速度因素
- 制空战机和慢速飞行器间的所需协调最小
缺点
- 在执行任务时,制空战机可能会照射到慢速飞行器
- 难以目视到慢速飞行器
- 可能会依赖ASACS的协助
- 在敌机的武器有效范围(WEZ)覆盖到慢速飞行器之前,制空战机难以判断敌机是否对慢速飞行器/制空战机造成威胁,因此拦截决定的标准较严格
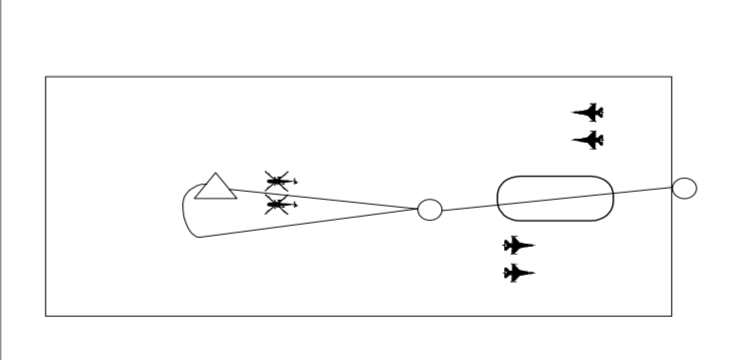
图5:FAOR任务示例

通联
执行任务的制空战机、慢速飞行器和其余的支援单位需要进行缜密的计划和简报,将空中的无线电通信量降至最低。如果条件允许,请尽可能的面对面进行简报。
频率
理想情况下,所有参与任务的飞机都会在执行任务期间同时使用两个不同的无线电频道。其中一个频率由flight内的战机(包括ASACS)进行监听和使用,此频率用于flight通讯,如通报威胁和队内下达命令。另一个频率为所有flight共用,用于整体任务的协调,不同flight间的通讯(如:慢速运输机、制空战机、SEAD战机、攻击直升机等)
无线电通报
威胁通报(如:地对空导弹系统、防空火炮、敌机)会在公共频率中通报,以提醒任务中的所有空中单位。对慢速航空器的移动指示(kick call)需要给定参照点,这样慢速航空器领队便可以最佳方式确定自身任务的限制要素,以及针对任意空对空和地对空威胁规避方案。(通报例:“Gorilla, recommend kick 160”)。如果先前未发现的敌机现在距离慢速飞行器/制空战机20海里内,且正快速逼近(短语:hot)时,应立即在无线电中通报此威胁。支援单位一定要考虑的一点是:慢速飞行器机组可能并不了解本手册附件5-1-C中介绍的特定短语。
靶眼点的选择
靶眼点应设置于慢速飞行器的目标区/降落区。如果路程较长,推荐设置多个靶眼点。设置多个靶眼点的时候,可将慢速航空器的航路点作为靶眼点。
空对空塔康
当电磁管制(EMCON)允许时,应使用空对空塔康来获取慢速飞行器的位置信息,以减少通过无线电通讯来获取位置信息态势的频率。
| |||||||||||||||||||||||||||